Содержание
3D-джойстик (Troyka-модуль)
Используйте 3D-Джойстик (Troyka-модуль) для управления роботом, видеоигрой и даже домашним питомцем. Модуль комбинирует в себе аналоговый двухосный джойстик и тактовую кнопку.

Видеообзор
Подключение и настройка
3D-Джойстик (Troyka-модуль) — сенсор с двумя аналоговыми выходами X и Y, и одним цифровым — Z. В нейтральном положении аналоговый сигнал соответствует половине напряжения питания, нажатие — бинарный цифровой сигнал.
При перемещении джойстика в одну сторону напряжение будет нарастать, а при движении джойстика в другую сторону — падать. Таким образом управляющее устройство будет получать данные о точном положении ручки джойстика и реагировать на угол наклона, а не только на сам факт наклона ручки.
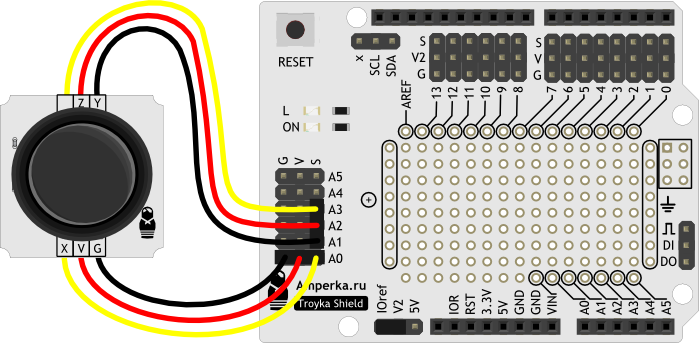
Модуль общается с управляющей электроникой по 5 проводам. Для подключения используется два 3-проводных шлейфа. Для быстрого подключения модуля к Arduino используйте Troyka Shield.
Пример работы
В качестве примера выведем в Serial-порт текущее значение отклонения джойстика по двум осям и состояние нажатия кнопки.
- joystick_test.ino
// даём разумное имя пинам, к которым подключён джойстик #define X A0 #define Y A1 #define Z A2 void setup() { // открываем последовательный порт для мониторинга действий в программе Serial.begin(9600); } void loop() { // переменные для хранения значений // отклонения джойстика по осям X и Y // и состояния кнопки Z int x, y, z; // считываем текущее значение джойстика x = analogRead(X); y = analogRead(Y); z = digitalRead(Z); // выводим результаты в serial-порт Serial.print(x); Serial.print(","); Serial.print(y); Serial.print(","); Serial.println(z); delay(100); }
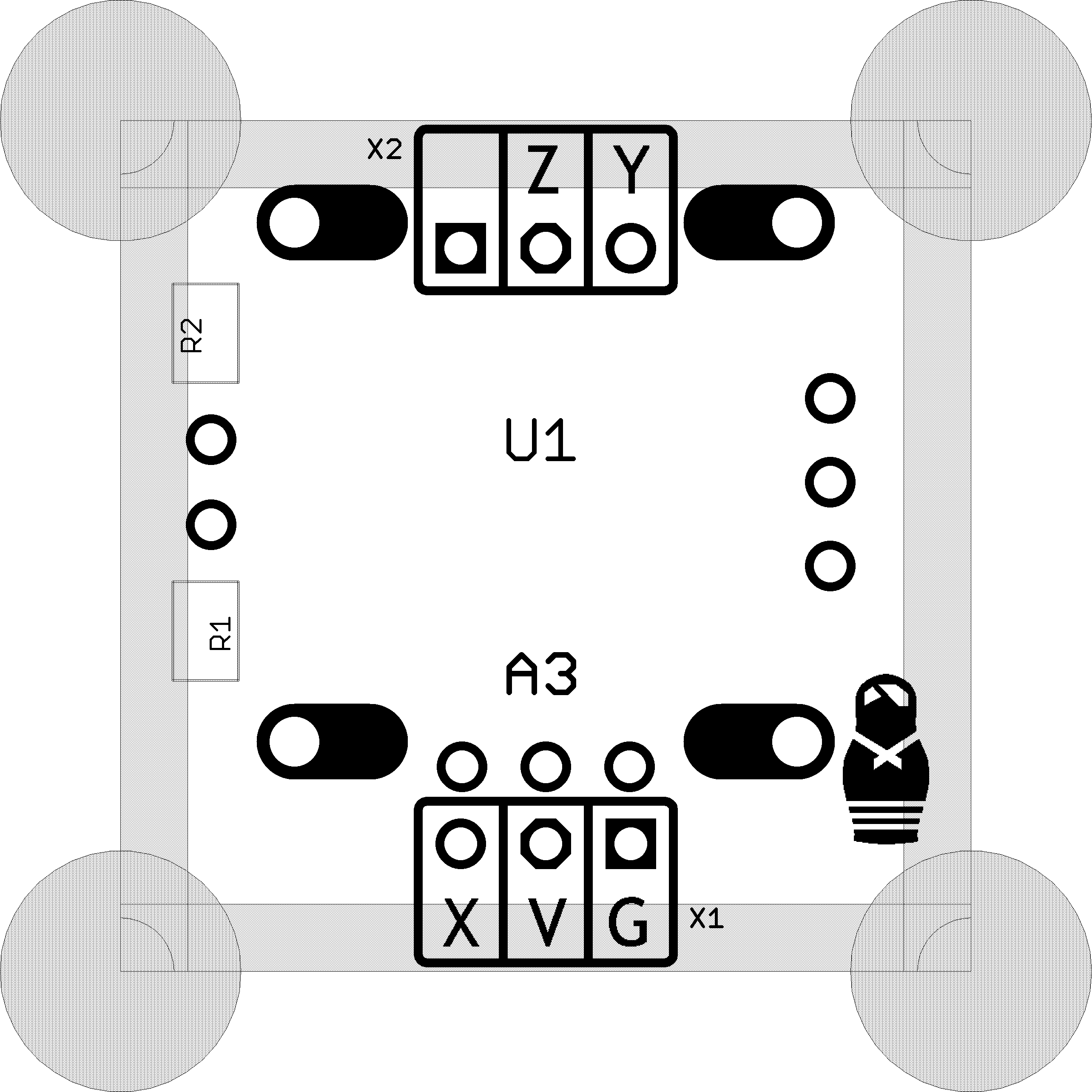
Элементы платы

Джойстик
Содержит два переменных резистора с возвратными пружинами, кнопку и прорезиненный колпачок — «грибок».
Контакты подключения 3-проводных шлейфов
1 группа
- Земля (G) — Чёрный провод. Соедините с пином
GNDмикроконтроллера. - Питание (V) — Красный провод. Соедините с пином
5Vмикроконтроллера. - Сигнальный (X) — Подключите к аналоговому входу микроконтроллера.
2 группа
- Сигнальный (Y) — Подключите к аналоговому входу микроконтроллера.
- Сигнальный (Z) — Подключите к аналоговому/цифровому входу микроконтроллера.
- Не используется.
Принципиальная и монтажная схемы

Характеристики
- Напряжение внешнего питания: 3–5 В
- Интерфейс по осям X, Y: аналоговый, линейный
- Интерфейс кнопки: цифровой, бинарный
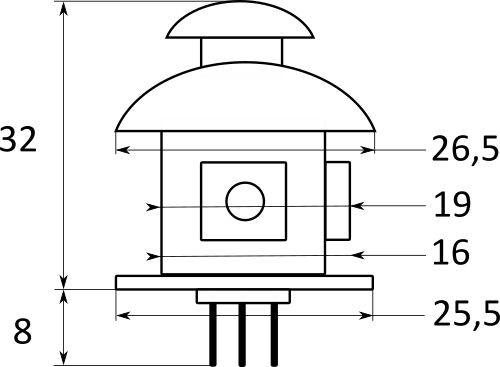
- Габариты: 25×25 мм