Содержание
Драйвер двигателей 4tronix drive:bit: инструкция, примеры использования и документация
Используйте драйвер моторов drive:bit для управления двумя коллекторными моторами, на базе которых вы можете создать мобильного робота, DIY-катер или гоночного болида.
Драйвер моторов drive:bit выполнен специально для контроллеров BBC micro:bit.
Подключение и настройка
Для старта необходимо подключить железо и выполнить программную настройку.
Аппаратная часть
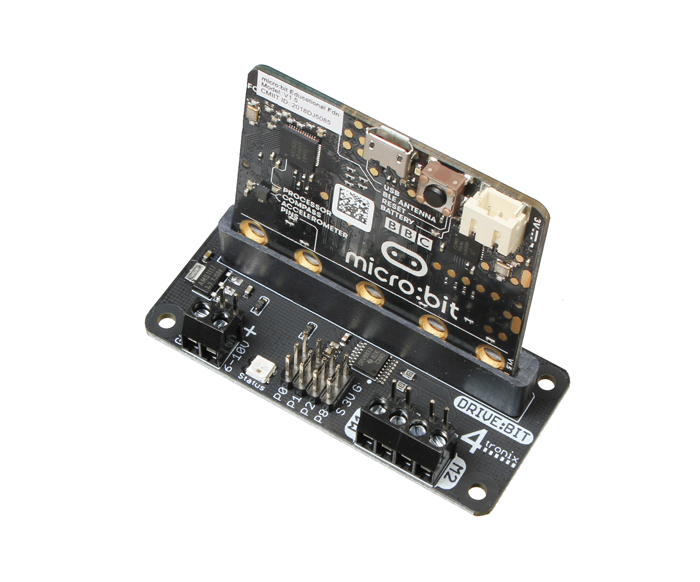
Драйвер моторов подключается к платформе micro:bit через фирменный краевой разъём.
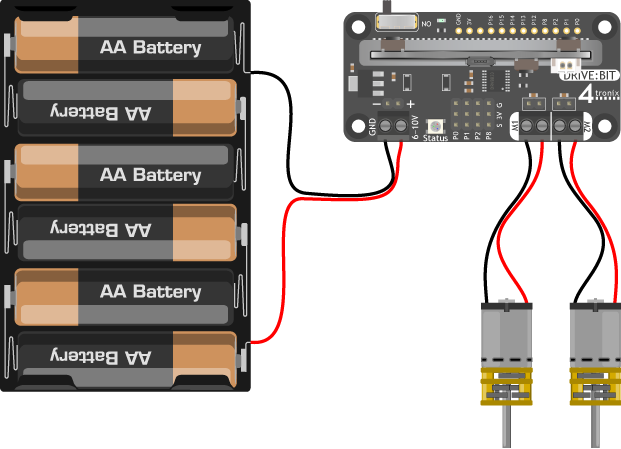
Используйте любой источник питания, главное что бы силовое напряжение вписывалось в диапазон от 6 до 10 вольт. Соответственно моторы подбирайте с номинальным напряжением обмотки на 1 вольт меньше в диапазоне от 5 до 9 вольт.
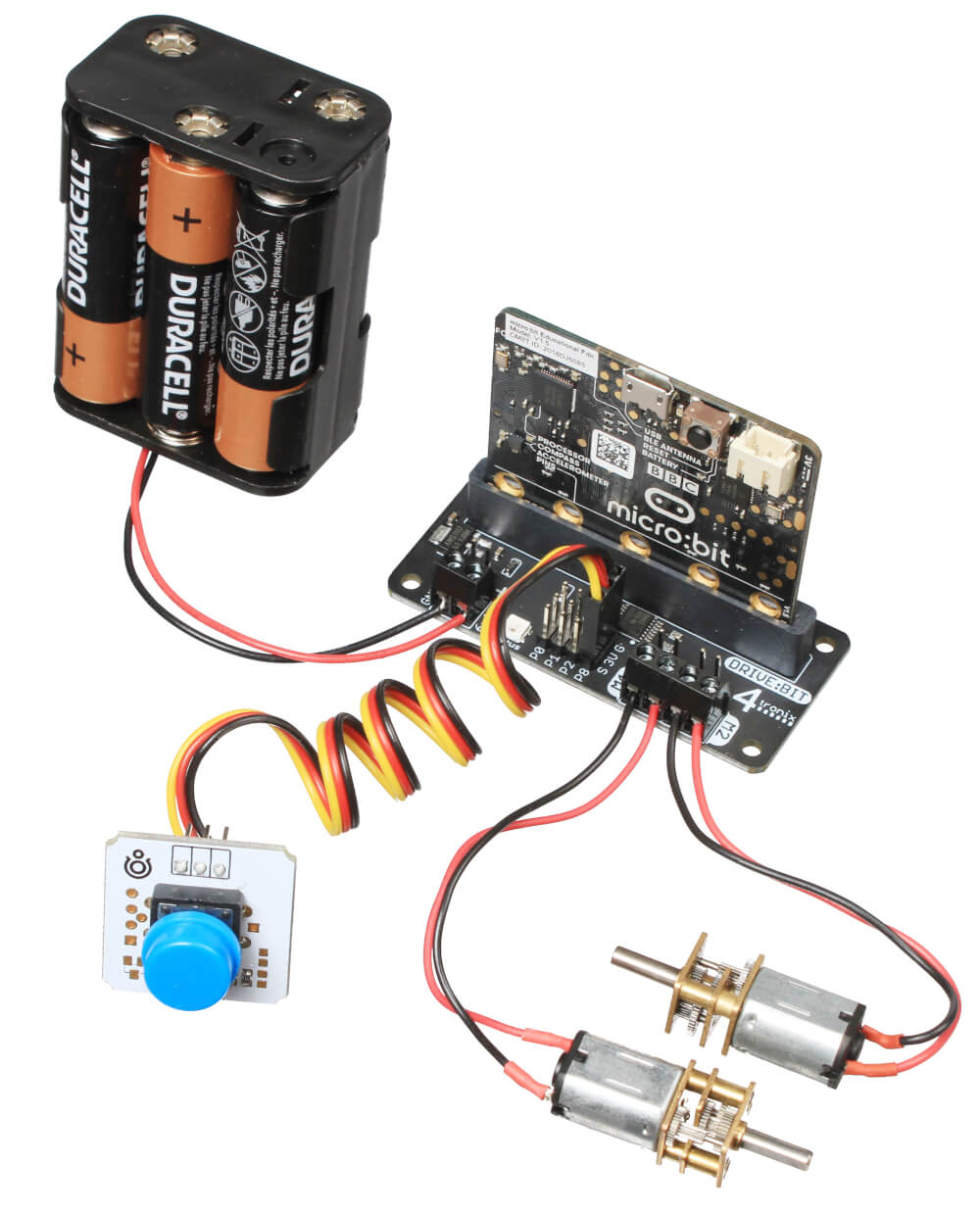
Что понадобится
Как собрать
- Установите платформу micro:bit в гнездо под краевой разъём на плате drive:bit.
- Подключите к плате drive:bit два коллекторных мотора в клеммники
M1иM2.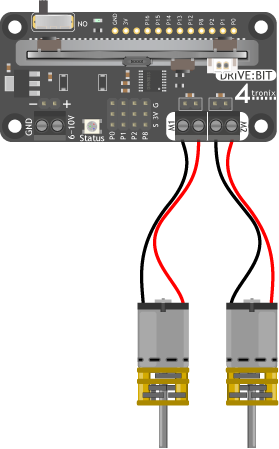
- Установите шесть элементов питания AA в батарейный отсек.
- Включите драйвер моторов, для этого переключите тумблер питания в режим
ON.
- Подключите micro:bit к компьютеру по USB.

Программная часть
- Создайте новый проект.
- Установите дополнительное программное обеспечение для miniBit:
и вбейте в поиск строку . Далее жмите по иконке найденного расширения для установки модуля. После установки в окне компонентов вы увидите иконку DriveBit.
- В установленном ПО для драйвера моторов вы найдёте блоки для управления коллекторными двигателями и индикаторного адресного светодиода.
На этом этапе drive:bit настроен на работу с системой micro:bit и можно смело переходить к примерам работы.
Примеры работы
Рассмотрим несколько примеров по работе с драйвером моторов drive:bit. Каждый пример сопровождается инструкцией по визуальному программированию в среде MakeCode, а затем кодом на JavaScript и Python.
Проверка светодиода
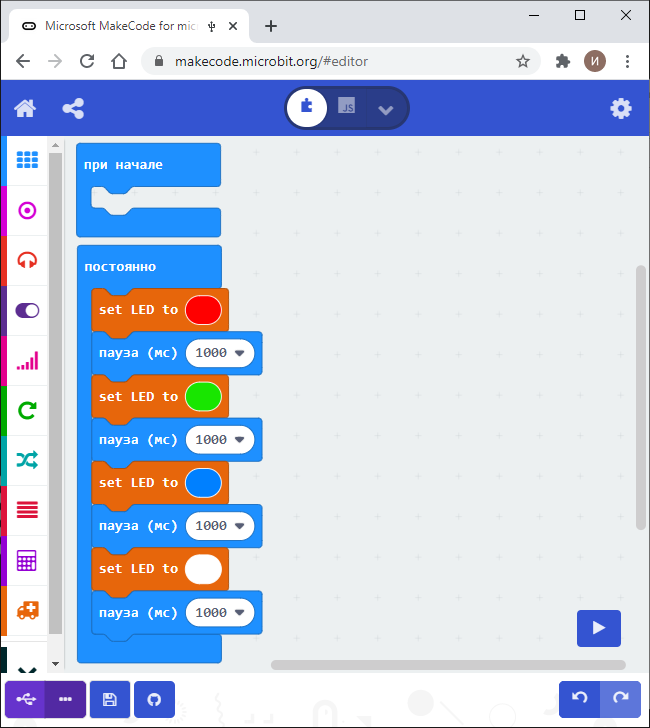
Для начала проведем тест на светодиодную индикацию, заставим пользовательский светодиод Status по очереди зажигаться красным, зелёным, синим и белым цветом.
Пример для визуального программирования
- Соберите схему из визуальных блоков.
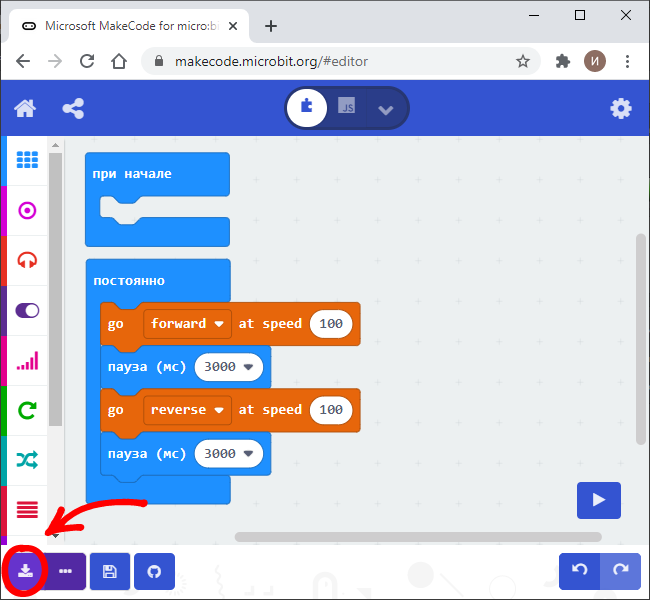
- Нажмите на иконку со значком USB для загрузки программы в плату micro:bit.
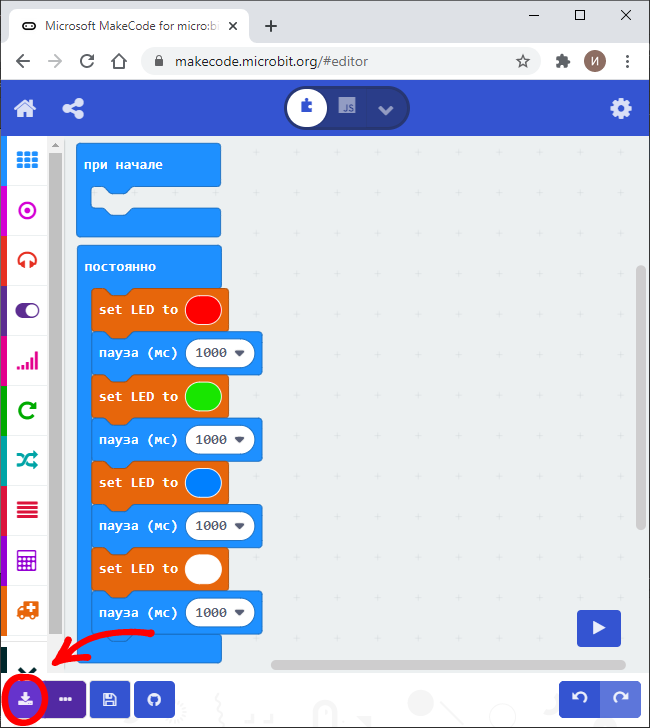
- После прошивки micro:bit, адресный светодиод WS2812B на плате drive:bit будет по очереди мигать красным, зелёным, синим и белым цветом.
Пример для JavaScript
- Переключите визуальный режим MakeCode на текстовый редактор JavaScript.
- Прошейте платформу кодом приведённым ниже.
- microbit-drivebit-examples-blink-javascript.js
basic.forever(function () { DriveBit.setLedColor(0xFF0000) basic.pause(1000) DriveBit.setLedColor(0x18E600) basic.pause(1000) DriveBit.setLedColor(0x0080FF) basic.pause(1000) DriveBit.setLedColor(0xFFFFFF) basic.pause(1000) })
- После прошивки micro:bit, адресный светодиод WS2812B на плате drive:bit будет по очереди мигать красным, зелёным, синим и белым цветом.
Пример для Python
- Переключите визуальный режим MakeCode на текстовый редактор Python.
- Прошейте платформу кодом приведённым ниже.
- microbit-drivebit-examples-blink-python.py
def on_forever(): DriveBit.set_led_color(0xFF0000) basic.pause(1000) DriveBit.set_led_color(0x18E600) basic.pause(1000) DriveBit.set_led_color(0x0080FF) basic.pause(1000) DriveBit.set_led_color(0xFFFFFF) basic.pause(1000) basic.forever(on_forever)
- После прошивки micro:bit, адресный светодиод WS2812B на плате drive:bit будет по очереди мигать красным, зелёным, синим и белым цветом.
Запуск моторов
А теперь заставим оба мотора сначала крутится на полной скорости в течении 5 секунд в одну сторону, а затем в течении 5 секунд другую.
Пример для визуального программирования
- Соберите схему из визуальных блоков.
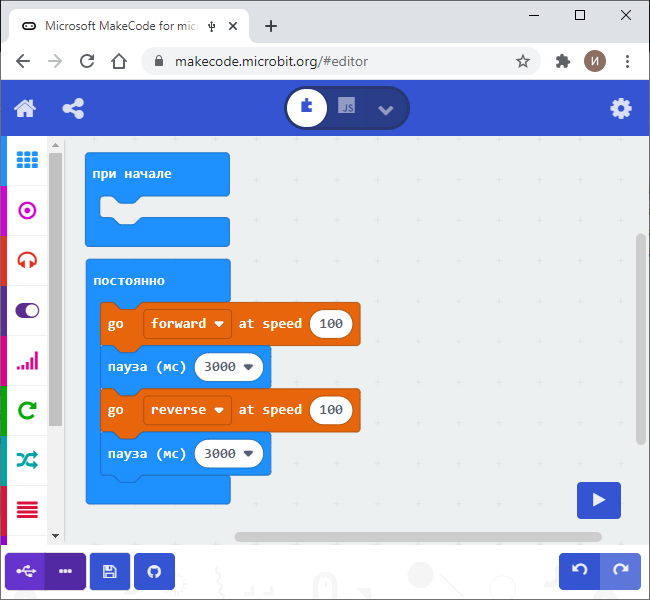
- Нажмите на иконку со значком USB для загрузки программы в плату micro:bit.
- После прошивки micro:bit, моторы начнут крутится в течении 5 секунд в одну сторону, а затем в течении 5 секунд в другую сторону.
Пример для JavaScript
- Переключите визуальный режим MakeCode на текстовый редактор JavaScript.
- Прошейте платформу кодом приведённым ниже.
- microbit-drivebit-examples-simple-motors-javascript.js
basic.forever(function () { DriveBit.go(dbDirection.Forward, 100) basic.pause(3000) DriveBit.go(dbDirection.Reverse, 100) basic.pause(3000) })
- После прошивки micro:bit, моторы начнут крутится в течении 5 секунд в одну сторону, а затем в течении 5 секунд в другую сторону.
Пример для Python
- Переключите визуальный режим MakeCode на текстовый редактор Python.
- Прошейте платформу кодом приведённым ниже.
- microbit-drivebit-examples-simple-motors-python.py
def on_forever(): DriveBit.go(dbDirection.FORWARD, 100) basic.pause(3000) DriveBit.go(dbDirection.REVERSE, 100) basic.pause(3000) basic.forever(on_forever)
- После прошивки micro:bit, моторы начнут крутится в течении 5 секунд в одну сторону, а затем в течении 5 секунд в другую сторону.
Элементы платы
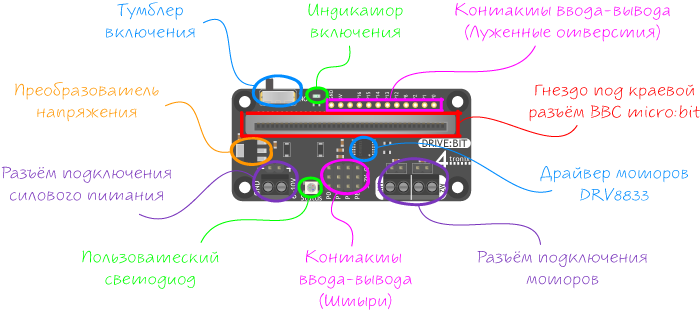
Драйвер моторов DRV8833
Мускулы платы — микросхема двухканального H-моста DRV8833. Каждый канал может независимо управлять одним коллекторным мотором с рабочим напряжением обмотки от 5 до 9 вольт и максимальным током до 1 ампера.
Разъём подключения силового питания
Для подключения силового питания моторов используйте клеммник под винт. В клемму с шелком + подключайте положительный провод питания, а в клемму − — отрицательный провод или землю. Рекомендуемое входное напряжение от 6 до 10 вольт. Клеммник питания также продублирован штыревыми соединителями «папа».
Контакты клеммника и штыревых соединителей электрически соединены на плате без всяких защитных элементов. При питании платы одновременно через оба разъёма от разных источников вы рискуете спалить устройство.
Разъём подключения моторов
Драйвер поддерживает управления двух независимых каналов. К каждому каналу можно подключить один коллекторный мотор с напряжением обмотки от 5 до 9 вольт. Первый канал на плате обозначен шёлком M1, второй канал — M2. Клеммники для подключения моторов также продублированы штыревыми соединителями «папа».
Светодиодная индикация
| Имя светодиода | Назначение |
|---|---|
| ON | Индикатор подачи силового питания. Горит при подключенном напряжении в силовой клеммник и включенном тумблере питания, во всех остальных случаях не горит. |
| STATUS | Пользовательский адресный светодиод WS2812B. Как управлять светодиодом читайте в примерах работы. |
Контакты ввода-вывода (штыри)
Плата drive:bit похвастается наличием контактных штырьков , где:
- Px — сигнал. Индекс указывает на номер пина ввода-вывода платы BBC micro:bit.
- V — питание.
- G — земля.
Контактные штыри ввода-вывода помогут расширить возможности будущего девайса, т.к. идеально подойдут для подключения к платформе micro:bit дополнительных Troyka-модулей.
Контакты ввода-вывода (луженные отверстия)
На плате присутствуют луженные отверстия которые дублируют контакты питания и ввода вывода подключенной платформы BBC micro:bit. Для удобства коммуникации рекомендуем обратить внимания на контактную гребенку PLS-40, которая облегчит доступ к заветным пинам.
Тумблер питания
За подачу питания от силового клеммника используйте механический переключатель на плате. Состояния модуля также дублирует информационный светодиод.
- ON — модуль включен. Светодиод горит.
- OFF — модуль отключен. Светодиод не горит.
Преобразователь напряжения
На плате расположен понижающий линейный регулятор AMS1117-3V3, который преобразует напряжение с силового клеммника до точных 3,3 вольт с максимальным выходным током 800 мА. А далее напряжение поступает через краевой разъём на плату BBC micro:bit. Это позволяет питать всю конструкцию от одного источника питания, т.е. только от силового клеммника без необходимости питать отдельно плату micro:bit.
Гнездо под краевой разъём BBC micro:bit
Драйвер моторов drive:bit содержит гнездо Edge Connector Cylconn 180 Degree для подключения платы BBC micro:bit через краевой разъём. Никаких проводов и тем более пайки не понадобится.
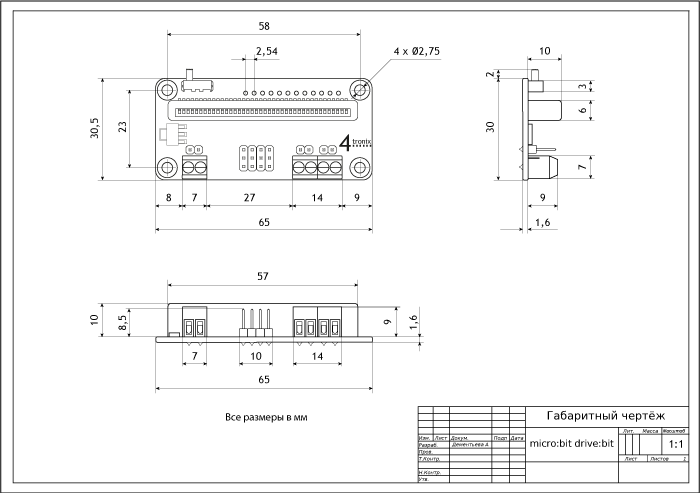
Габаритный чертёж
Характеристики
- Модель: 4tronix drive:bit
- Совместимость: микрокомпьютеры BBC micro:bit
- Разъём модуля: гнездо под краевой разъём micro:bit
- Индикация: RGB-светодиод WS2812
- Микросхема драйвера двигателей: DRV8833
- Количество подключаемых моторов: 2
- Напряжение питания: 6–10 В (с защитой от переполюсовки)
- Рабочее напряжение моторов: 5–9 В
- Ток нагрузки: до 1 А на канал
- Размеры: 65×30,5×11,6 мм
{kind=link}