Содержание
Сервопривод Feetech FB5118M: инструкция, примеры использования и документация
Используйте сервопривод Feetech FB5118M для моделирования движения различных механизмов. Привод может открывать/закрывать заслонки для создания кормушки домашнему питомцу или для проектирования тайника в квеструме. А ещё сервомотор даст возможность вашему роботу управлять руками или вращать головой.
Цифровой сервопривод Feetech FB5118M управляется по сигналу PDM (Pulse Duration Modulation), способен удерживать угол от 0 до 300° и обладает крутящим моментом до 17,5 кг·см. А на закуску привод похвастается выходным сигналом с датчика обратной связи для точного измерения текущего угла.
Примеры работы
Подробности про PDM сервоприводы с удержанием угла и примеры работы для Arduino, Espruino и Raspberry Pi читайте в нашей инструкции по использованию сервоприводов PDM.
Для настройки примеров конкретно под сервопривод Feetech FB5118M используйте данные :
- Минимальная ширина импульса: 500 мкс
- Максимальная ширина импульса: 2500 мкс
- Минимальный угол поворота вала: 0°
- Максимальный угол поворота вала: 300°
- Напряжение обратной связи в крайнем положении по часовой стрелке CW: 0,11 В
- Напряжение обратной связи в крайнем положении против часовой стрелке CCW: 3,22 В
Элементы сервопривода
 Чтобы узреть устройство сервопривода, приведём схематическое расположение его элементов.
Чтобы узреть устройство сервопривода, приведём схематическое расположение его элементов.
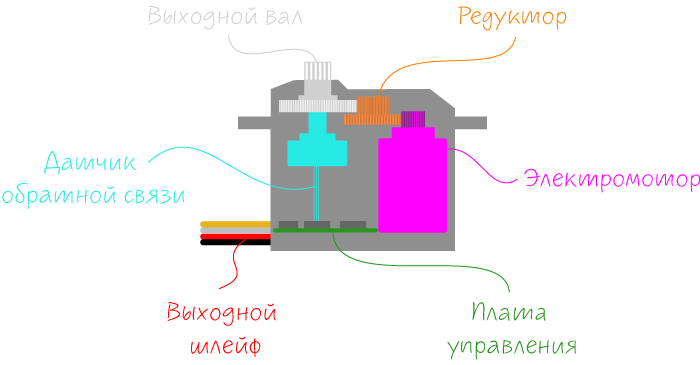
Электромотор с редуктором
За преобразование электричества в механический поворот отвечает коллекторный мотор. Для практического использования скорость вращения мотора слишком большая, а крутящий момент — наоборот слишком слабый. Для решения двух проблем выходной вал мотора соединён с группой нейлоновых шестеренок, которые пропорционально позволяют увеличить крутящий момент, но при этом снизить скорость вращения выходного вала. Всё аналогично коробке передач в автомобиле.
Выходной вал
Цифровой сервопривод Feetech FB5118M способен устанавливать и удерживать угол выходного вала от 0 до 300°.
Выходной вал — это часть редуктора, которая выведена за пределы корпуса сервопривода и непосредственно приводится в движение при подаче управляющих сигналов на мотор. К выходному валу крепится необходимая нагрузка: например качалка, вращающийся вал, тянущие или толкающие механизмы. Вал выполнен в формате 25T/5.9, где 25T — количество зубьев, а 5.9 — внешний диаметр в мм.
В комплектации серво идут качельки разных форм-факторов, которые надеваются на вал сервопривода для дальнейшего соединения с механизмами ваших устройств.

Не прилагайте к валу сервопривода нагрузки, которые больше крутящего момента. Это может привести к разрушению редуктора.
Плата управления
Для обработки входного сигнала с внешнего контроллера в сервоприводе расположена цифровая схема управления, которая принимает импульсы, сравнивает их с показателем датчика обратной связи и по результату управляет мотором.
Датчик обратной связи
Для контроля положения вала на сервоприводе установлен потенциометр, который играет роль датчика обратной связи. Потенциометр преобразует угол поворота вала в электрический сигнал, который поступает на плату управления в сервоприводе и выведен отельным сигнальным проводом FB.
Выходной шлейф
| Цвет провода | Контакт | Функция | Подключение |
|---|---|---|---|
| Оранжевый | FB | Пин с датчика обратной связи | Подключите к пину ввода-вывода микроконтроллера с поддержкой АЦП. |
| Белый | S | Пин управления сервоприводом | Подключите к пину ввода-вывода микроконтроллера. |
| Красный | V | Питание | Подключите к питанию от 4 до 8,4 вольт. |
| Чёрный | G | Земля | Подключите к земле. |
Напряжение к сервоприводу можно подключать двумя способами: без внешнего источника питания и с внешним источником питания. Подробности читайте в нашей инструкции по использованию сервоприводов PDM с удержанием угла.
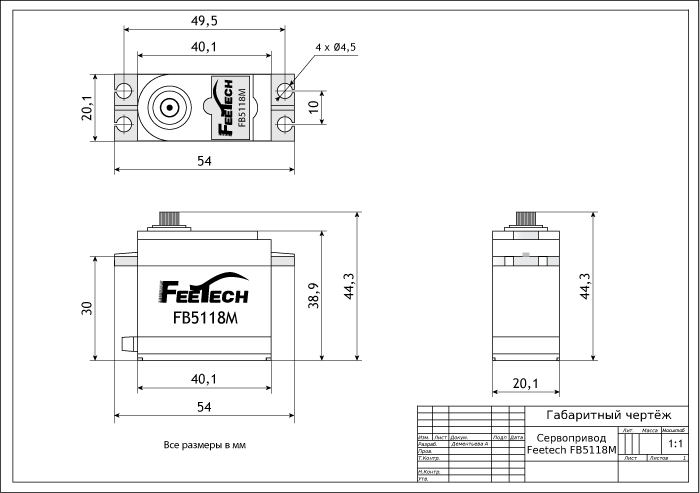
Габаритный чертёж
Характеристики
- Модель: Feetech FB5118M
- Сигнал управления: PDM (Pulse Duration Modulation)
- Напряжение питания: 4–8,4 В
- Потребляемый ток:
- 180 мА при 6 В
- 220 мА при 7,4 В
- Пиковый потребляемый ток:
- 800 мА при 6 В
- 1200 мА при 7,4 В
- Скорость вращения:
- 60° за 0,2 сек (180° за 0,6 сек) при 6 В
- 60° за 0,167 сек (180° за 0,5 сек) при 7,4 В
- Крутящий момент:
- 15 кг·см при 6 В
- 17,5 кг·см при 7,4 В
- Внутренний интерфейс: цифровой с обратной связью
- Диапазон поворота вала: удержание угла 0–300°
- Выходной вал: 25T / 5,9 мм
- Материал шестерней: сталь
- Материал корпуса: пластик
- Размеры: 54×20,1×44,3 мм
- Вес: 65 г
{kind=link}