Содержание
Электронный тайник с IMU-сенсором
- Платформы: Iskra Mini
- Языки программирования: Arduino (C++)
- Тэги: шкатулка с секретом, Himitsu-Bako, углы Эйлера, загадка, квест
Что это?
Любите интересные загадки, создаёте квесты или просто хотите устроить надёжный и необычный тайник? Соберите магическую шкатулку, замок который невозможно взломать отмычкой или открыть на слух.
Открытая шкатулка считывает свою ориентацию в пространстве в 3 позициях, запоминает их и закрывается. Теперь открыть её можно только повторив комбинацию положений ещё раз.
Что нам понадобится?
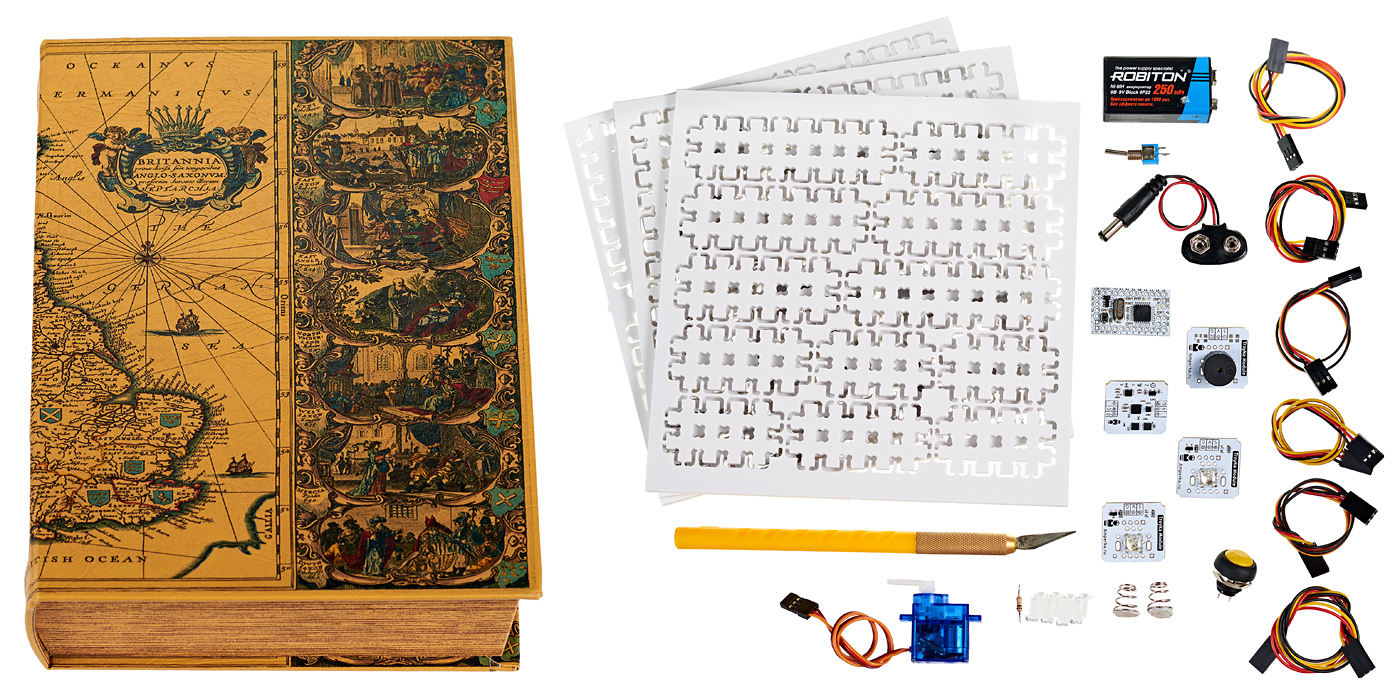
- Arduino Uno или USB-Serial адаптер для программирования Iskra Mini.
- Нейлоновые винты М3×8 (8 шт.)
- Шкатулка-фолиант
Как собрать?
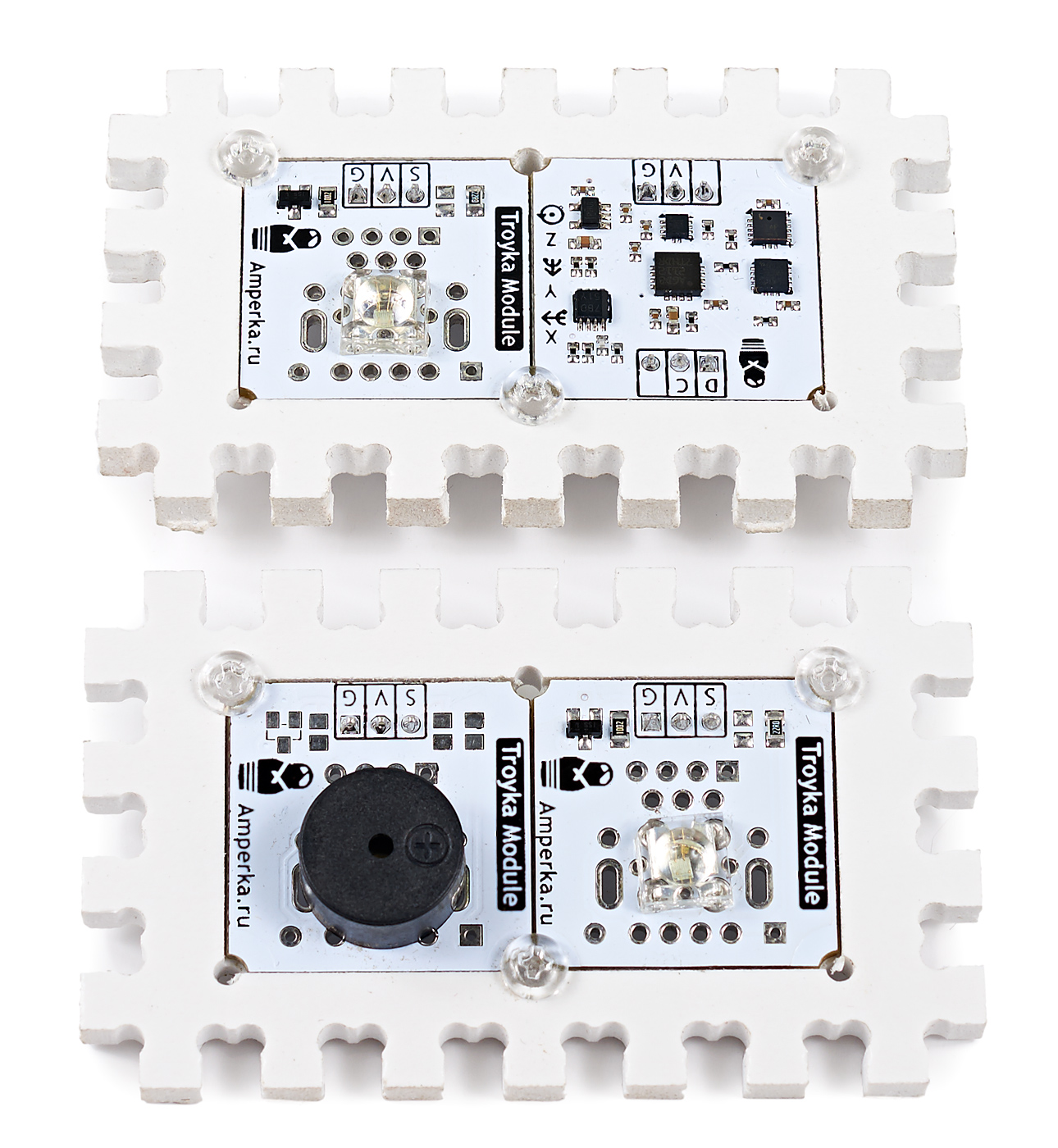
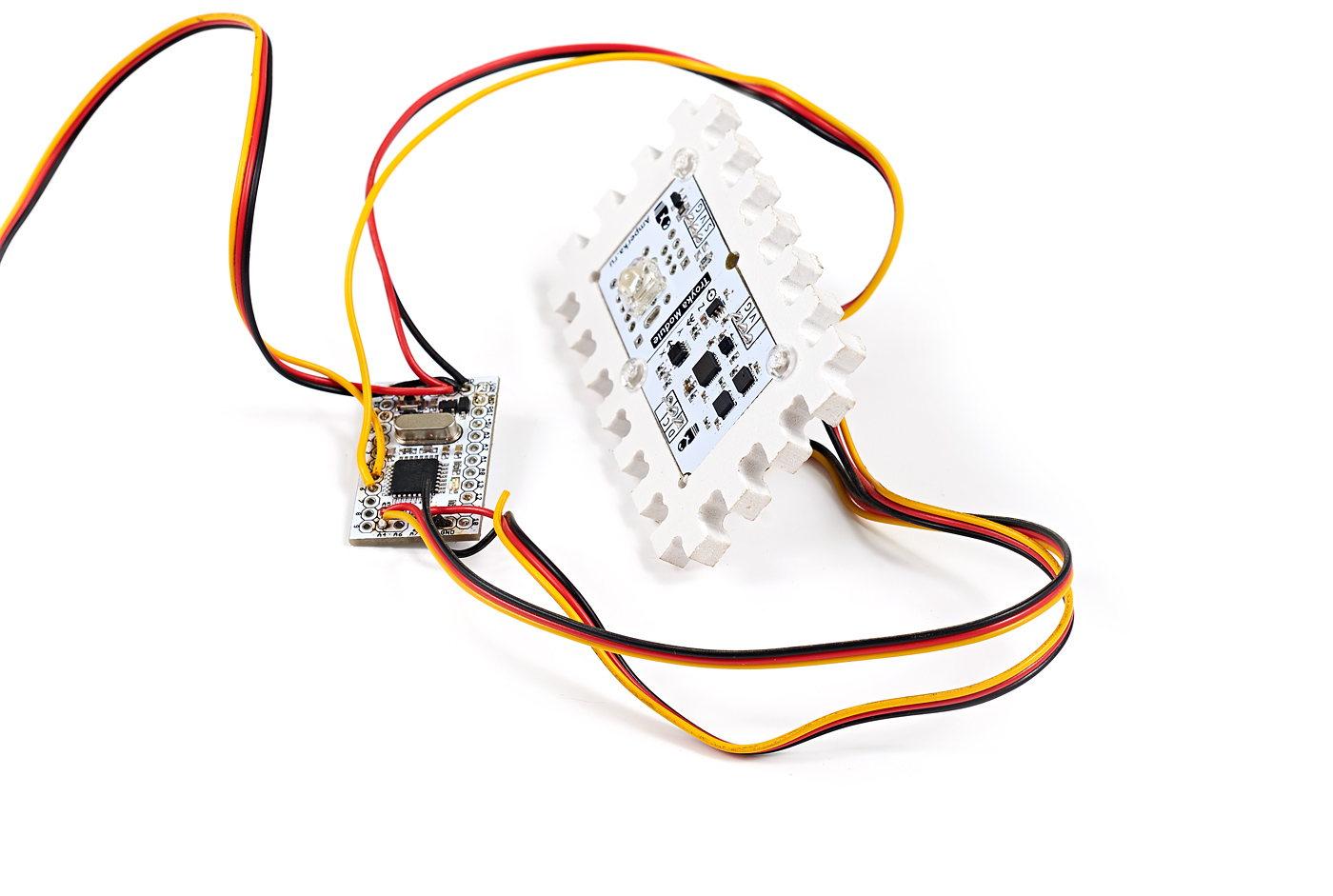
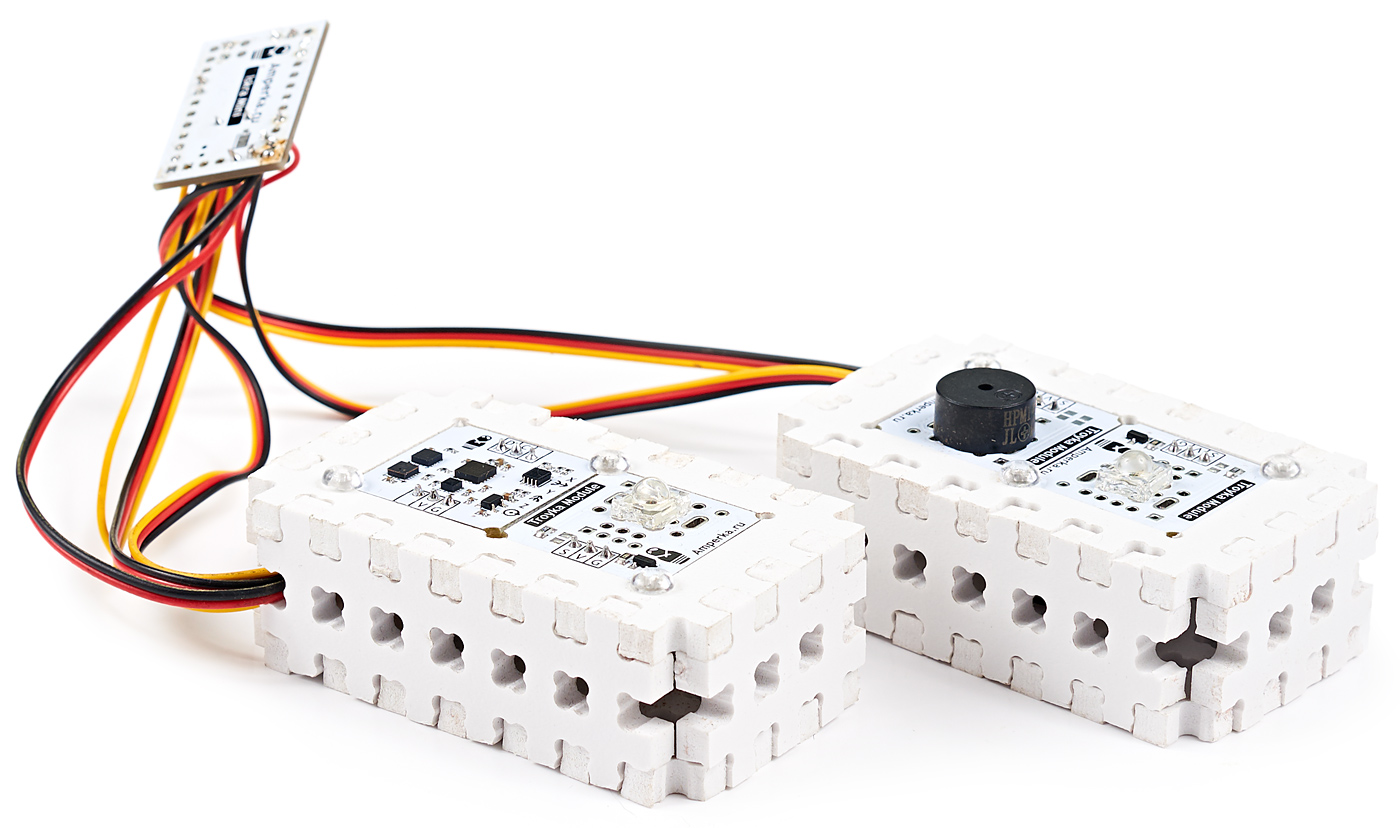
- Закрепите светодиод «Пиранья» (Troyka-модуль) и IMU-сенсор на 10 степеней свободы на панели крепления двух Troyka-модулей (#Структор) нейлоновыми винтами. Аналогично закрепите второй светодиод и зумер.
- Подключите два светодиода «Пиранья» (Troyka-модуль) к
5и6цифровому пину платы Iskra Mini следующим образом:- возьмите два трёхпроводных шлейфа «мама-мама» и откусите с одной стороны разъём для подключения Troyka-модулей;
- скрутите между собой красные и чёрные провода;
- припаяйте красные провода к питанию, чёрные — к земле, жёлтые к
5и6пину; - подключите трёхпроводные шлейфы к светодиодам «Пиранья».
Остальные модули и сенсоры подключаются аналогично.
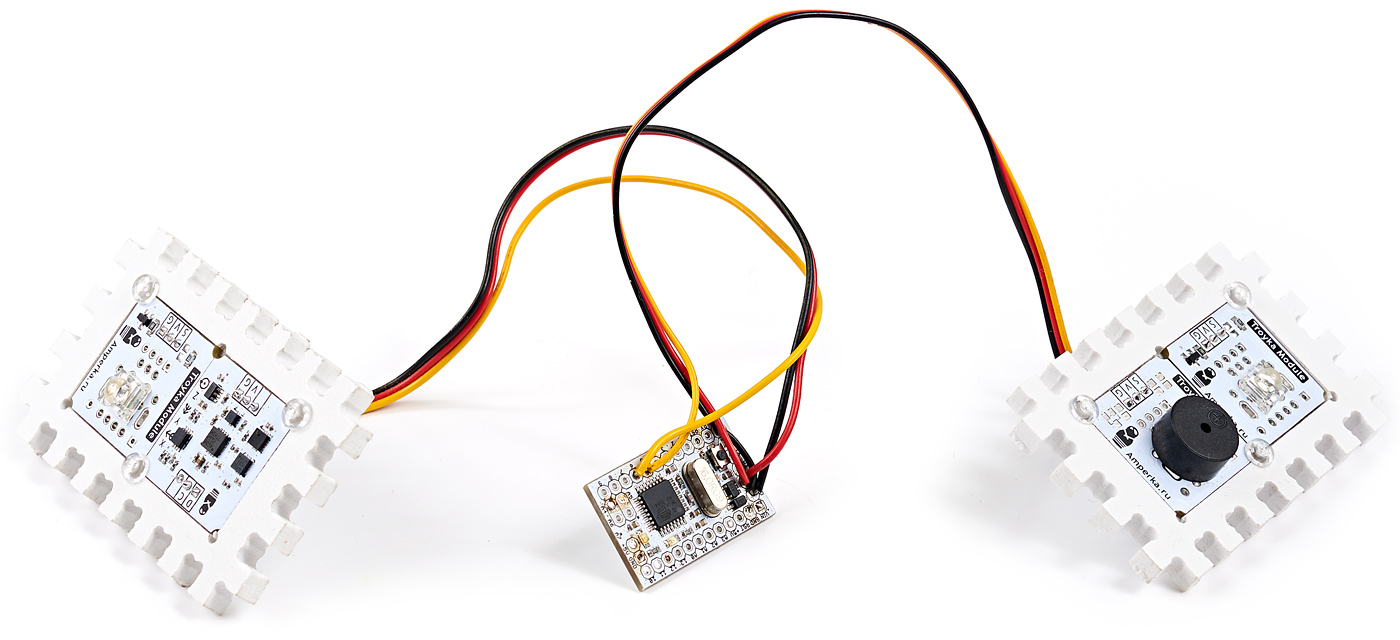
- Используйте два трёхпроводных шлейфа для подключения IMU-сенсора к Iskra Mini:
- Контакты питания:
- Земля (G) — чёрный провод. Соедините с пином GND.
- Питание (V) — красный провод. Соедините с пином VCC.
- Не используется.
- Контакты шины I²C:
- Сигнальный (D) — жёлтый провод. Подключите к пину
A4(SDA). - Сигнальный (С) — красный провод. Подключите к пину
A5(SCL). - Не используется.
- Подключите зуммер (Troyka-модуль) через трёхпроводной шлейф к
12цифровому пину Iskra Mini.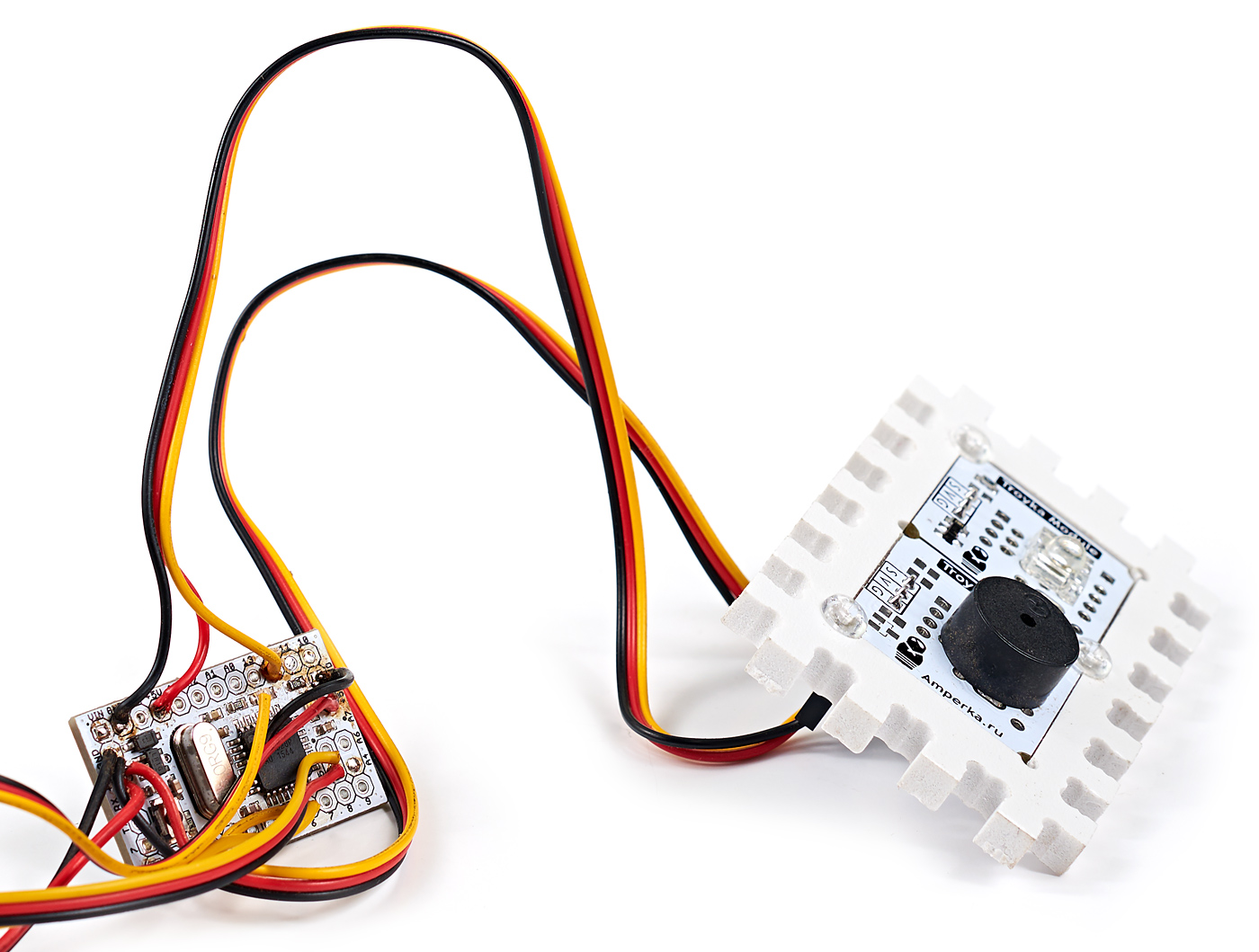
- Припаяйте трёхпроводной шлейф к
11цифровому пину. В будущем через него подключим корпусную кнопку.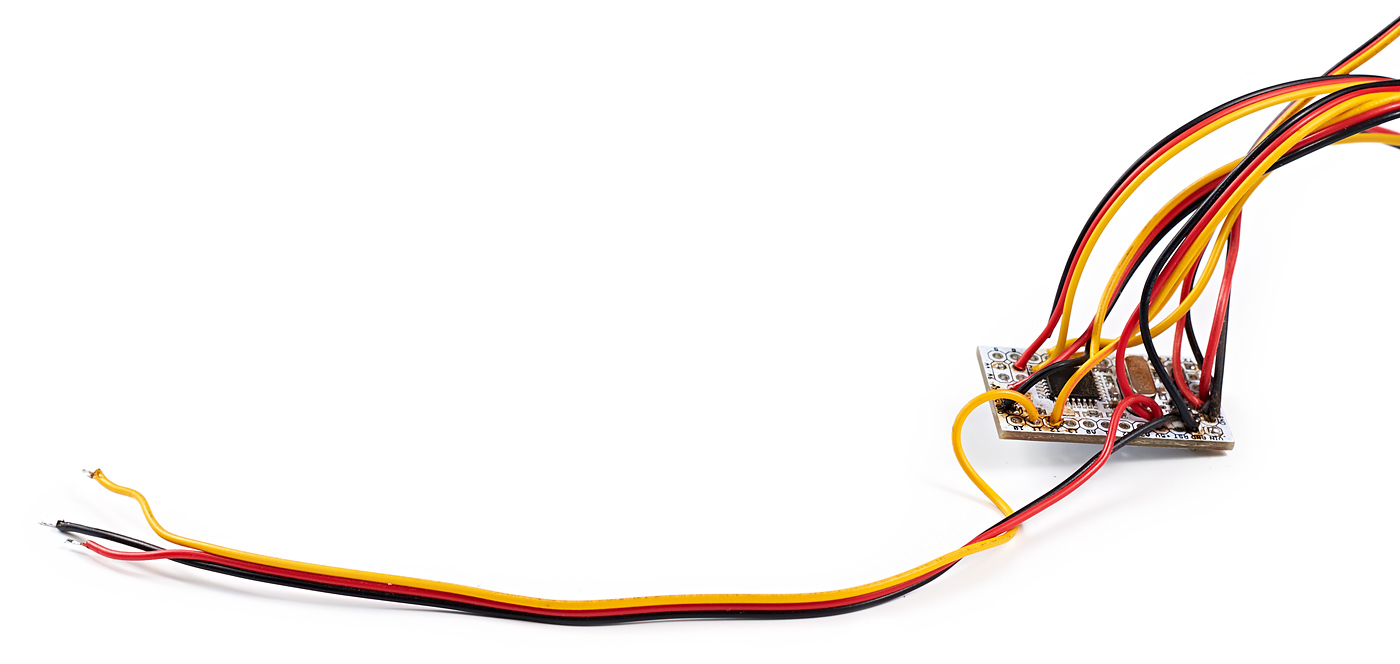
- Подключите микросервопривод к
10цифровому пину Iskra Mini.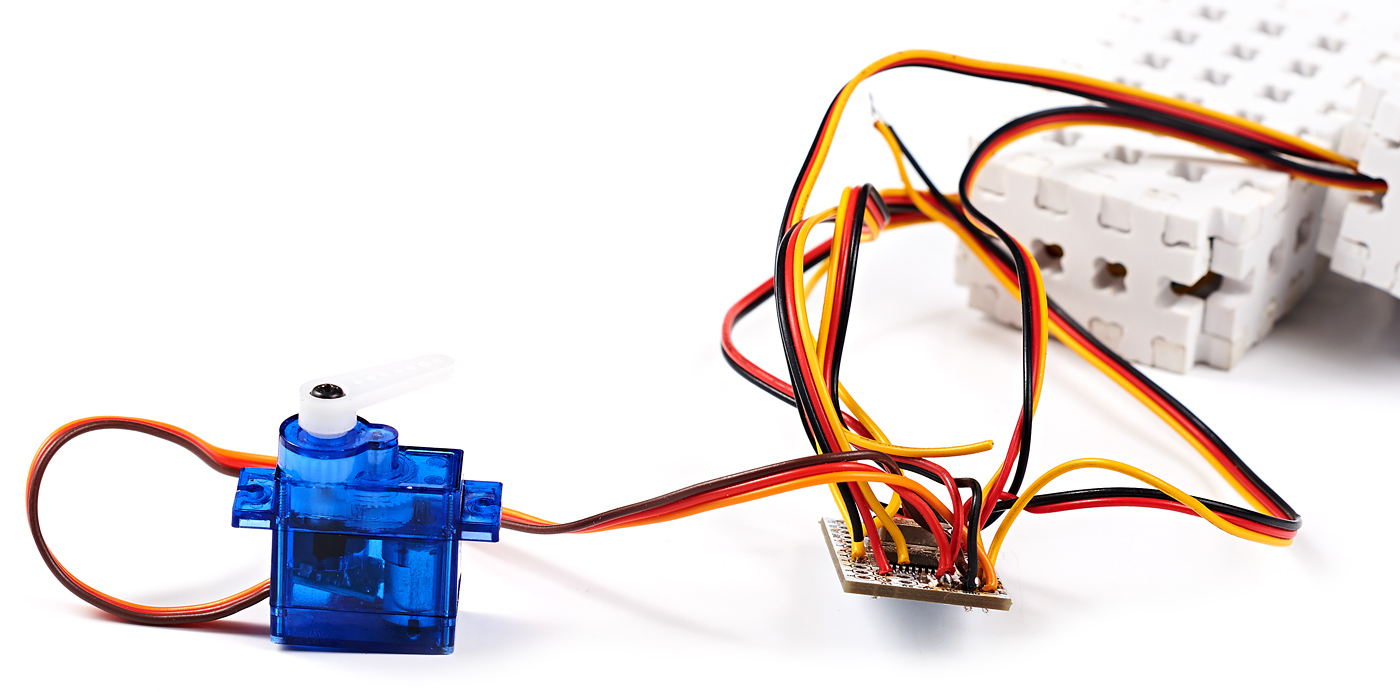
- Соедините кабель питания от батарейки «кроны» через выключатель к Iskra Mini:
- контакт
+— наVinплаты Iskra Mini; - контакт
−— наGNDплаты Iskra Mini.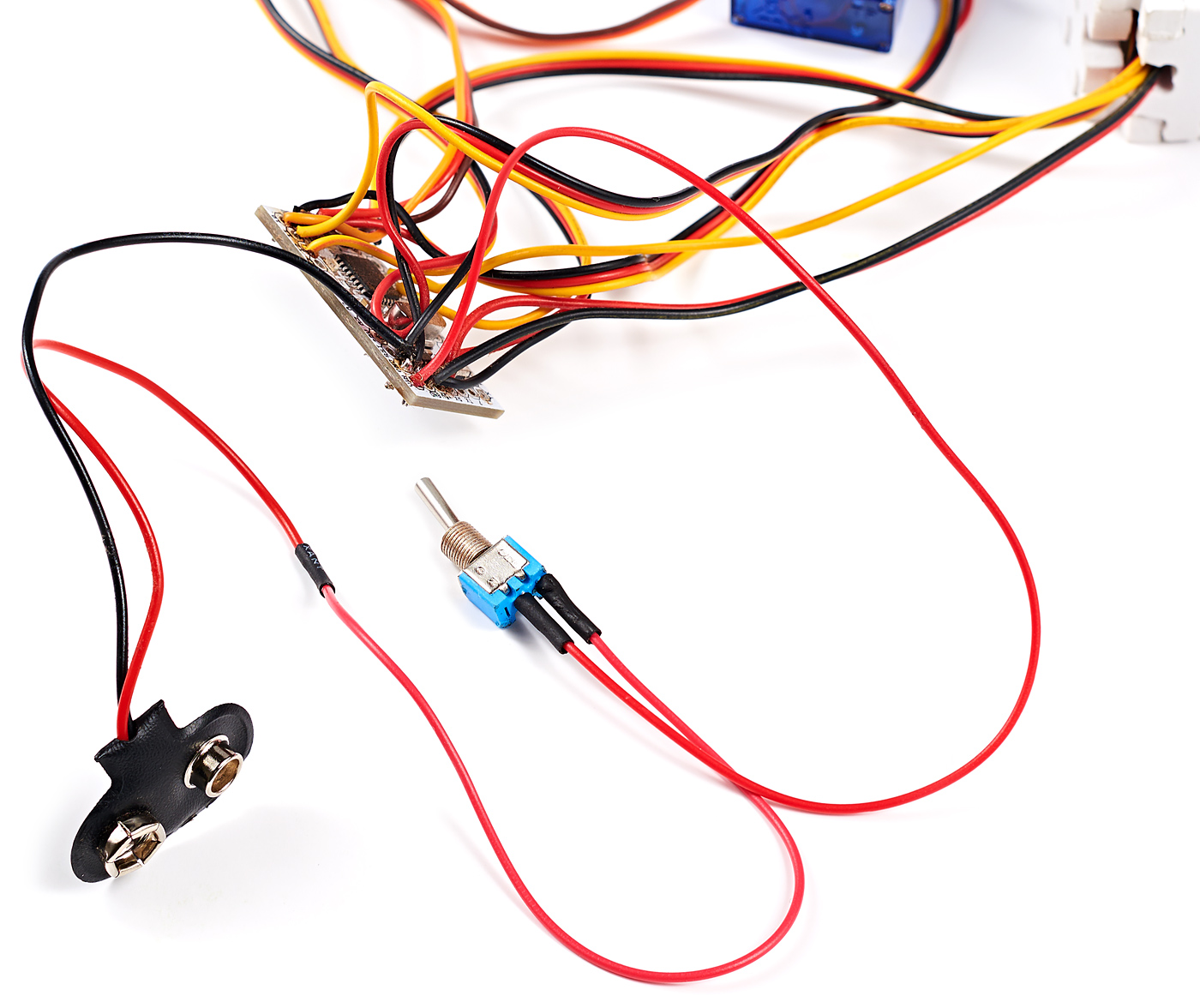
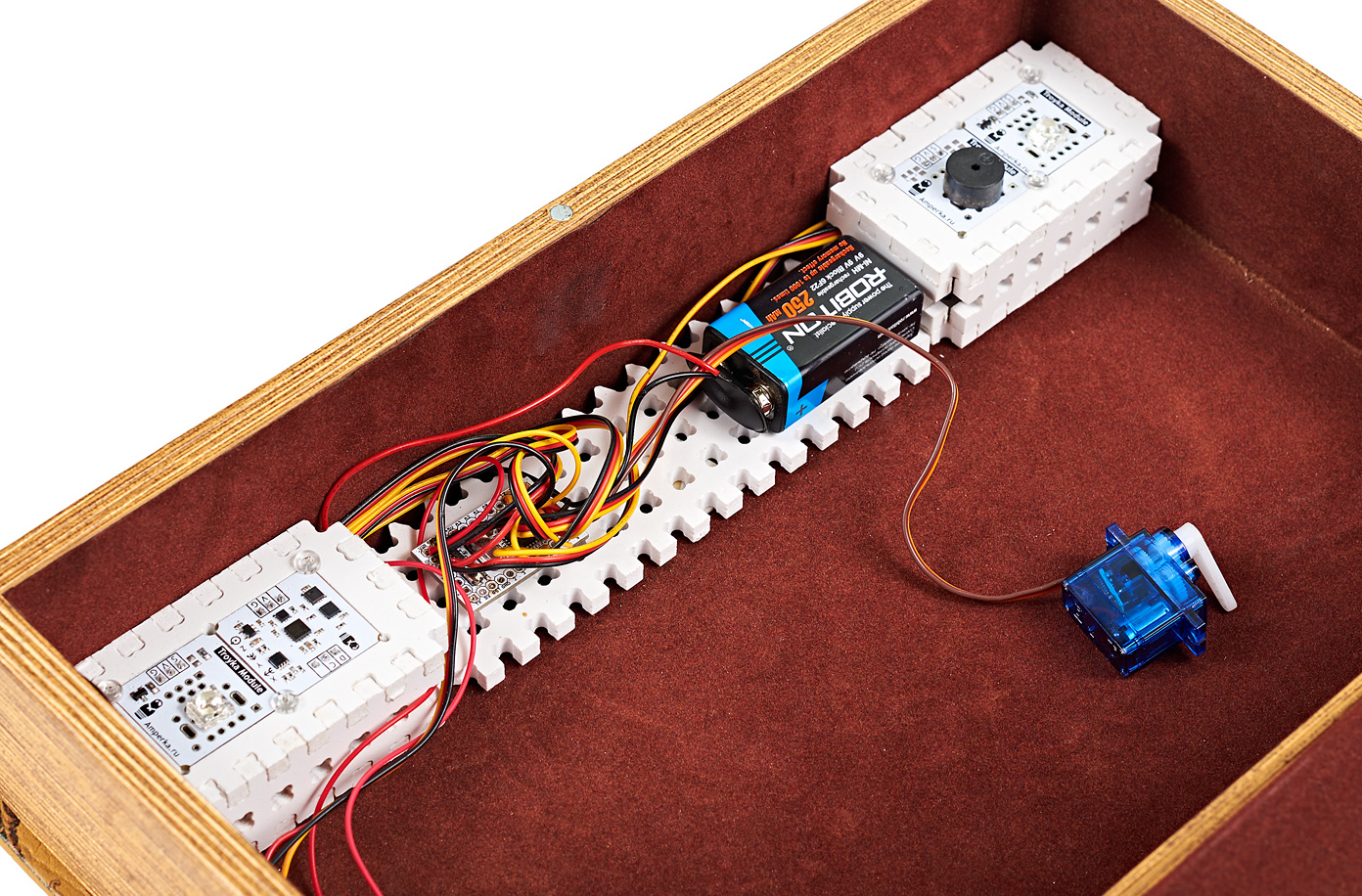
- Сделайте «домики» из структора для установки Troyka-модулей.
 и установите всю электронику в шкатулку.
и установите всю электронику в шкатулку. - В боковых частях шкатулки закрепите собранные «домики» из Troyka модулей.
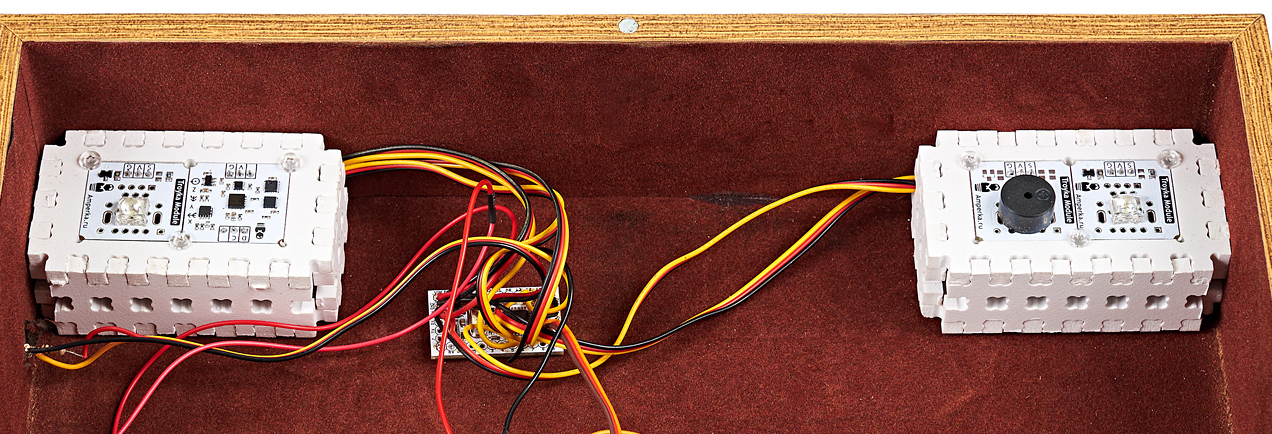
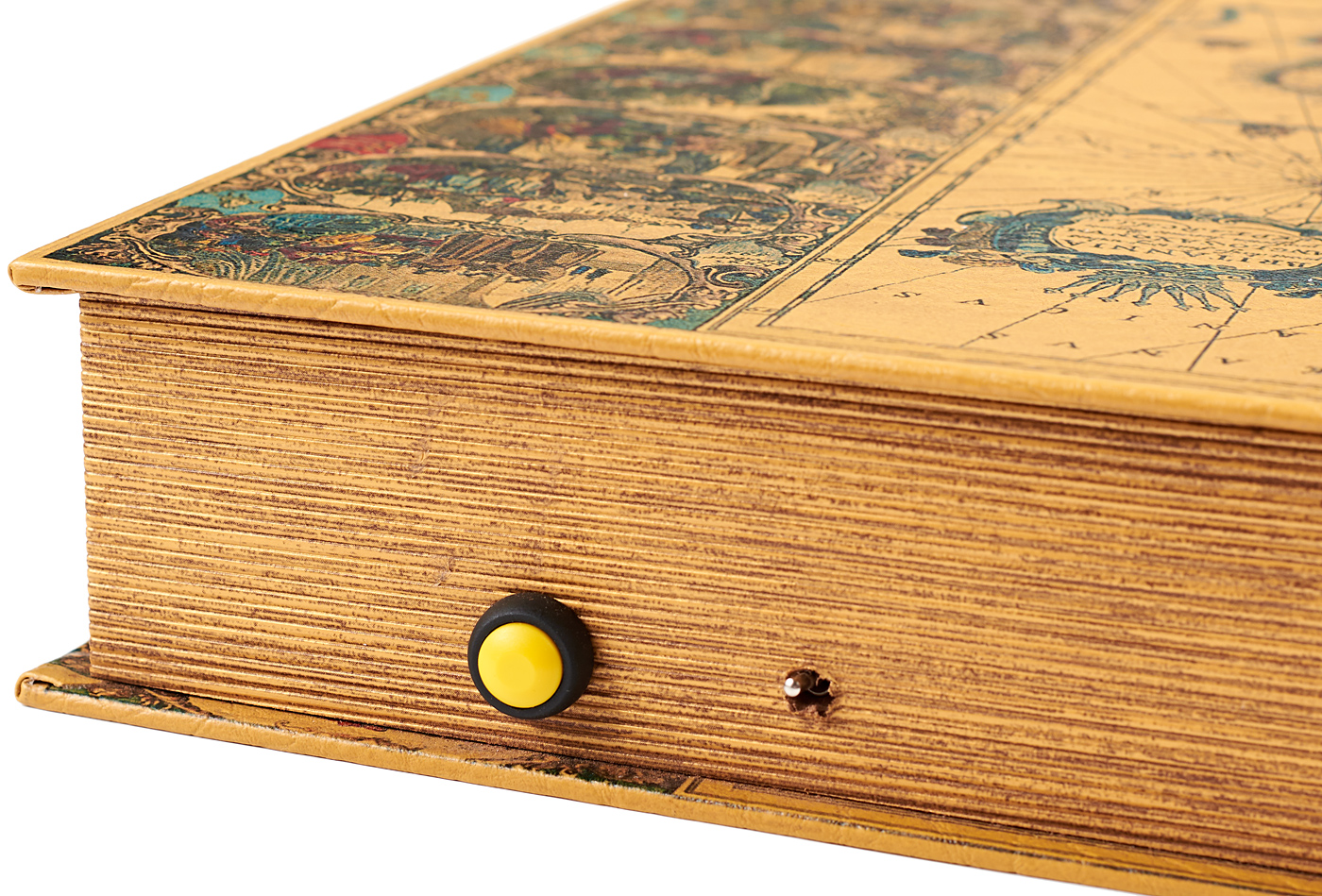
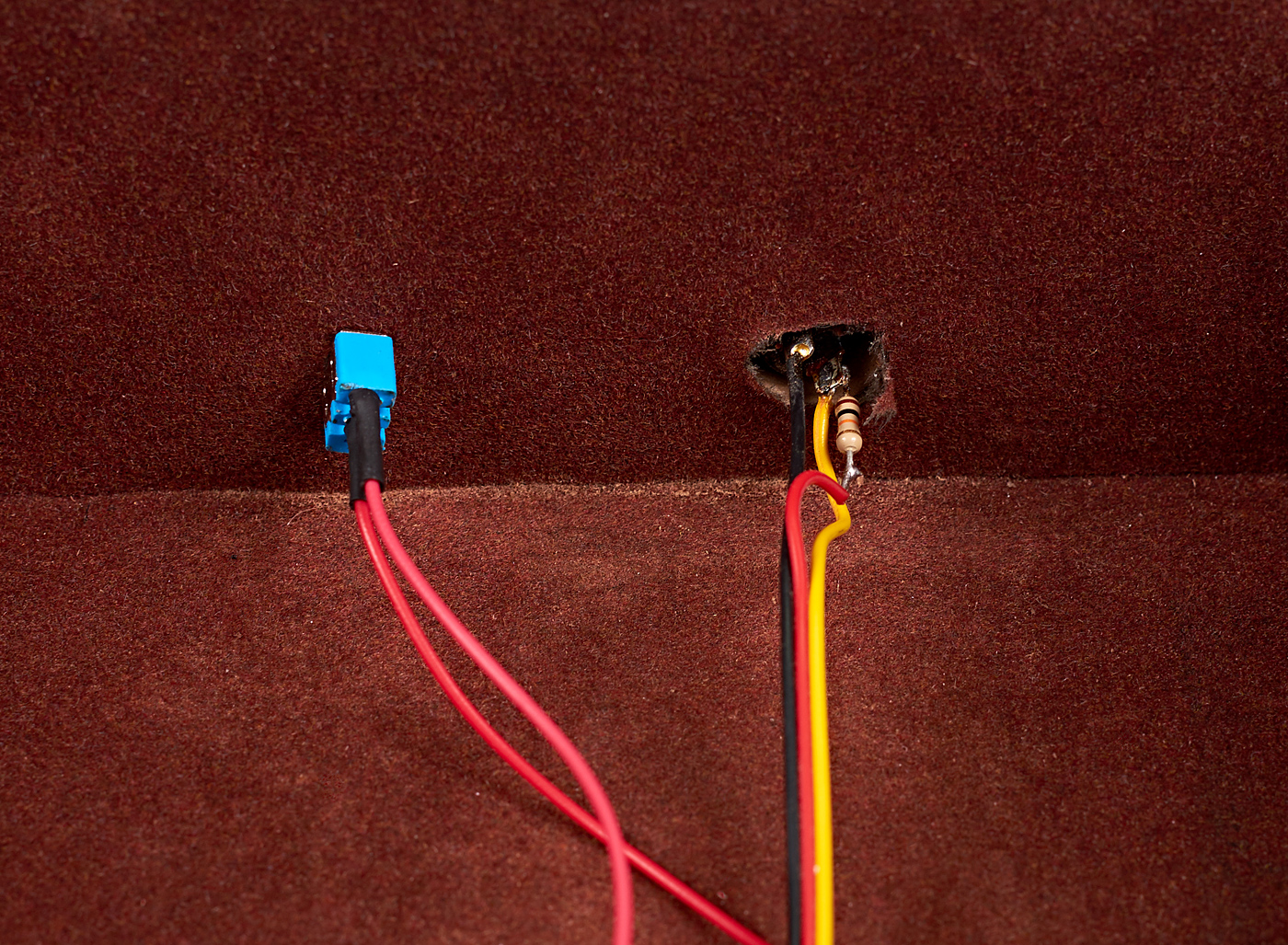
- Установите в боковую грань шкатулки кнопку и выключатель в заранее просверленные отверстия.
- Припаяйте корпусную кнопку трёхпроводным шлейфом к Iskra Mini используя подтягивающий резистор.
 В итоге должна получиться схема:
В итоге должна получиться схема: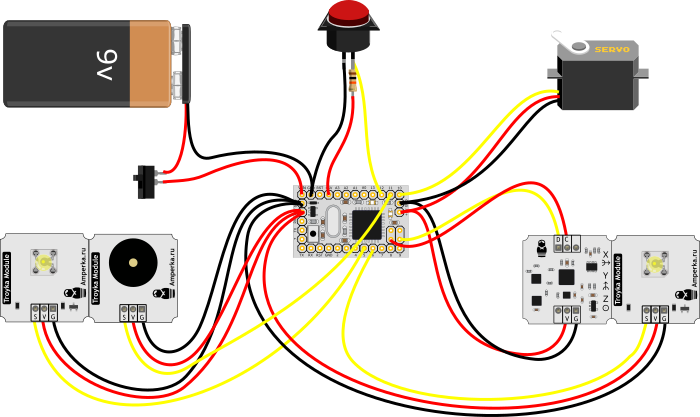
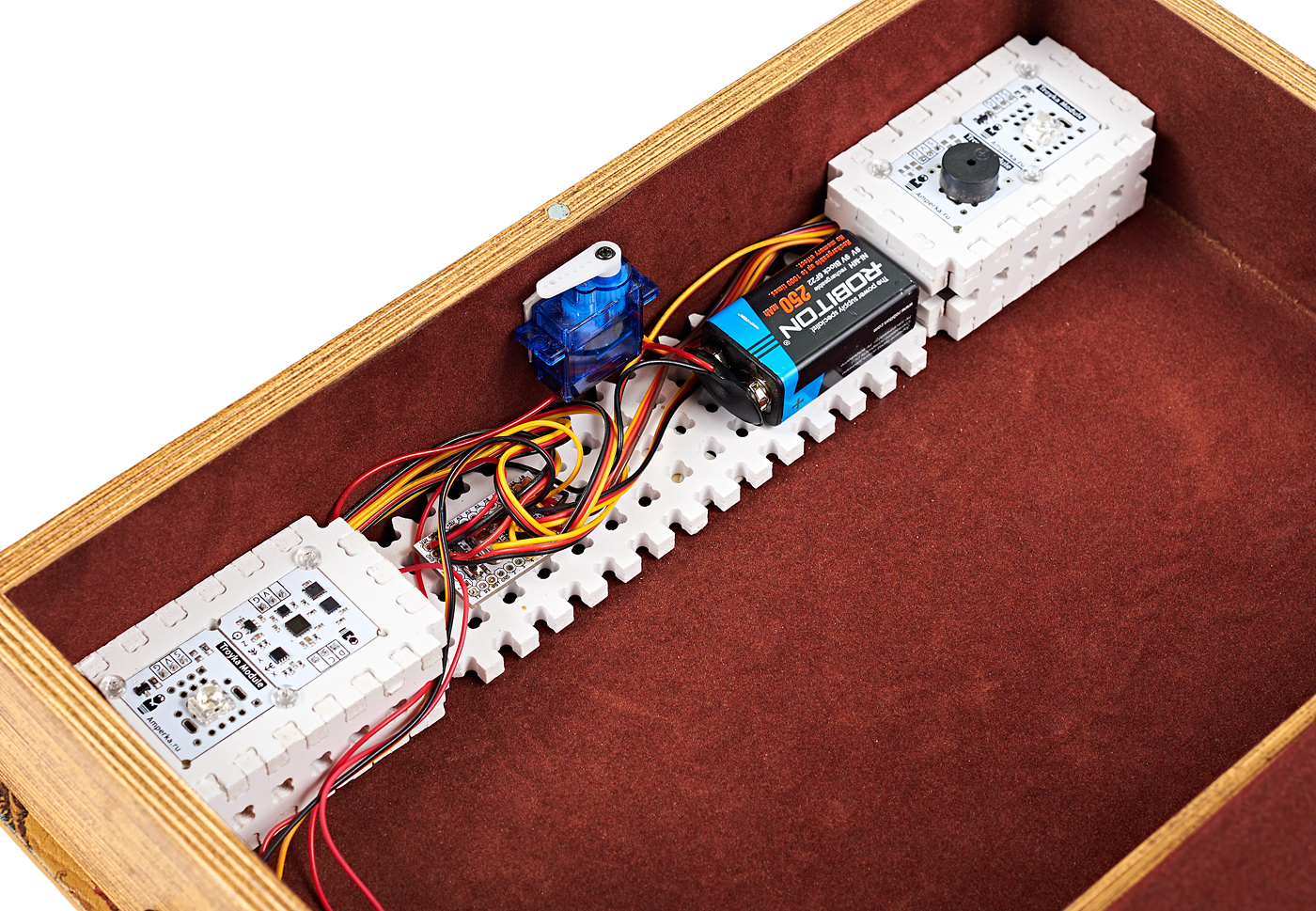
- Установите плату Iskra Mini и батарейку «крона» в шкатулку с помощью #Структора и двухсторонней клейкой ленты.
- Закрепите сервопривод на передней панели шкатулки.
- С помощью #Структора сделайте запорную скобу для качельки сервопривода.
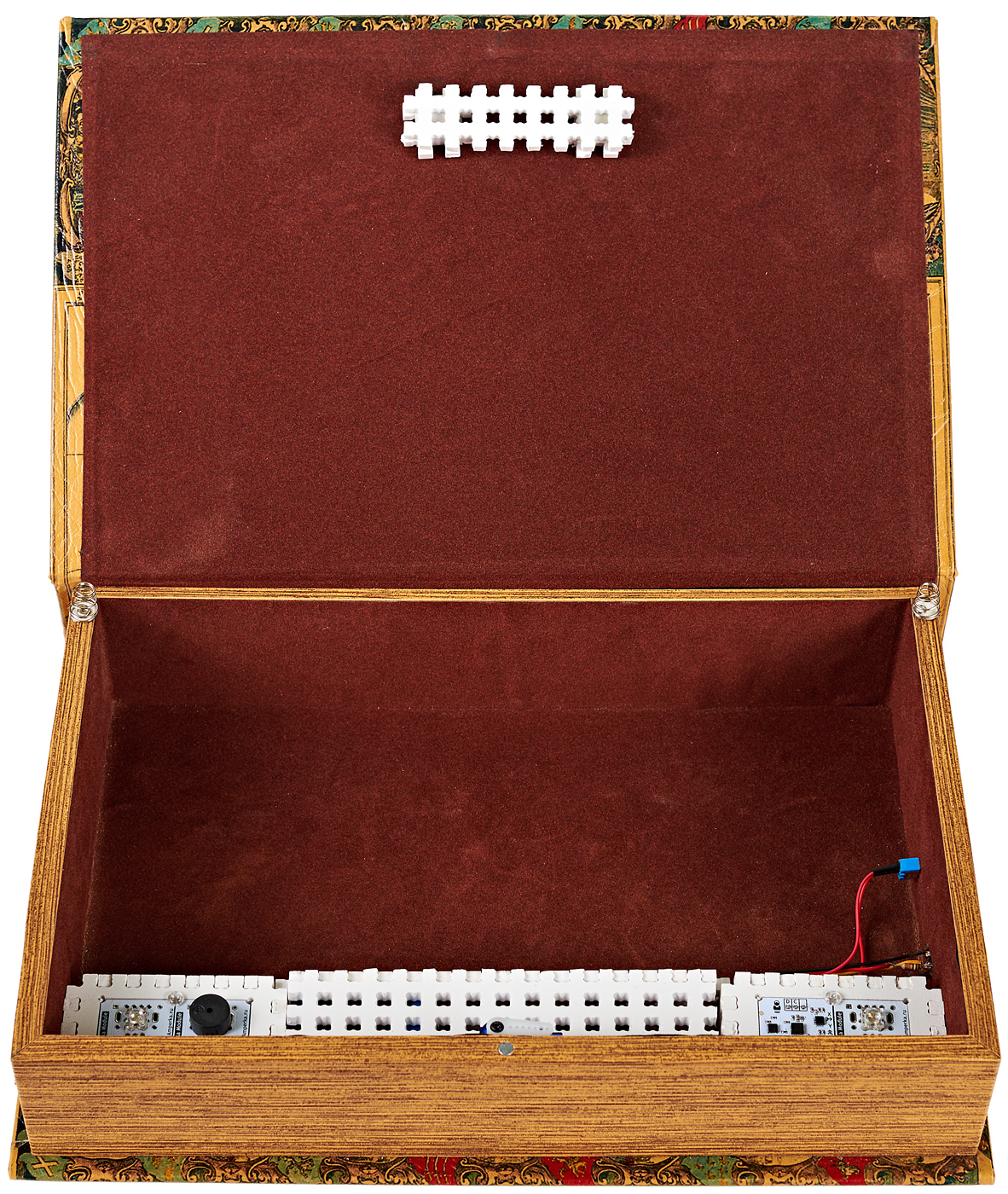
- Разломайте батарейный отсек, извлеките пружинки и установите их на боковые грани шкатулки.

Алгоритм
- После подачи питания открываем шкатулку.
- Проверяем состояние кнопки.
- Если кнопка не нажата проверяем снова и снова.
- Устанавливаем новый пароль.
- Подтверждаем новый пароль.
- Если пароли не совпадают, повторяем установку нового пароля.
- Закрываем шкатулку.
- Проверяем состояние кнопки.
- Если кнопка не нажата проверяем снова и снова.
- Считываем введённый пароль.
- Проверяем введённый пароль с паролем установленным в шкатулке.
- Если пароли не совпадают, возвращаемся в состояние закрытой шкатулки и ожидания нажатия кнопки.
- Проверяем в какую сторону направлена шкатулка.
- Если в течении 10 секунд направление шкатулки не будет в сторону севера, возвращаемся в состояние закрытой шкатулки и ожидания нажатия кнопки.
- Открываем шкатулку.
Исходный код
Для работы ниже приведённого скетча вам понадобиться скачать и подключить библиотеку Troyka-IMU.
- magicbook.ino
// библиотека для работы I²C #include <Wire.h> // библиотека для работы с модулями IMU #include <TroykaIMU.h> // библиотека для работы с сервоприводами #include <Servo.h> // создаём объект для работы с сервоприводом Servo myServo; // даём разумное имя для пинов, к которым подключены светодиоды #define INDICATOR_PIN_1 5 #define INDICATOR_PIN_2 6 // даём разумное имя для пина, к которому подключена кнопка #define SERVO_PIN 10 // даём разумное имя для пина, к которому подключена кнопка #define BUTTOM_PIN 11 // даём разумное имя для пина, к которому подключена пищалка #define BUZZER_PIN 12 #define N 3 // множитель фильтра #define BETA 0.22 // дрифт углов Эйлера #define DRIFT_LIMIT 0.3 // компенсация точного местоположения объекта в пространстве #define DRIFT_COMPRASION 10 // создаём объект для фильтра Madgwick Madgwick filter; // создаём объект для работы с акселерометром Accelerometer accel; // создаём объект для работы с гироскопом Gyroscope gyro; // создаём объект для работы с компасом Compass compass; // переменные для данных с гироскопа, акселерометра и компаса float gx, gy, gz, ax, ay, az, mx, my, mz; // получаемые углы ориентации (Эйлера) float yaw, pitch, roll; float prevYaw, prevPitch, prevRoll; // переменная для хранения частоты выборок фильтра float fps = 100; unsigned long prevMillis; unsigned long currMillis; // создаём структуру struct vector { float x; float y; float z; }; // переменная состояния int flag = 0; // калибровочные значения компаса // полученные в калибровочной матрице из примера «compassCalibrateMatrixx» const double compassCalibrationBias[3] = { 524.21, 3352.214, -1402.236 }; const double compassCalibrationMatrix[3][3] = { {1.757, 0.04, -0.028}, {0.008, 1.767, -0.016}, {-0.018, 0.077, 1.782} }; // состояния шкатулки: // открыта, закрыта, ввод нового пароля, подтверждение нового пароля enum State { OPENED, CLOSED, SETPWD, CNFPWD, }; // массив для хранения кода шкатулки vector codeBox[3]; // массив для хранения кода подтверждения vector confirmCodeBox[3]; // массив для хранения кода, при попытке открыть шкатулку vector codeOpenBox[3]; // состояние шкатулки State state; void setup() { // открываем последовательный порт Serial.begin(115200); Serial.println("Begin init..."); pinMode(INDICATOR_PIN_1, OUTPUT); pinMode(INDICATOR_PIN_2, OUTPUT); // подключаем сервопривод myServo.attach(SERVO_PIN); // инициализация акселерометра accel.begin(); // инициализация гироскопа gyro.begin(); // инициализация компаса compass.begin(); // задаем начальное ненулевое значение в переменную prevMillis = millis(); // калибровка компаса compass.calibrateMatrix(compassCalibrationMatrix, compassCalibrationBias); // даём время стабилизироваться объекту в пространстве while(!stayIMU(12000)) { } // выводим сообщение об удачной инициализации Serial.println("Initialization completed"); // выбираем текущее состояние шкатулки state = OPENED; } void loop() { // проверяем состояние шкатулки switch (state) { // шкатулка открыта case OPENED: { // открываем шкатулку open(); // пока кнопка не нажата while (digitalRead(BUTTOM_PIN) == HIGH) { // ничего не делаем } // переходим в состоянии установки нового пароля state = SETPWD; break; } // шкатулка закрыта case CLOSED: { // закрываем шкаиулку close(); // пока кнопка не нажата while (digitalRead(BUTTOM_PIN ) == HIGH){ // следим за ориентацией объекта в пространстве readYawPitchRoll(); } // считываем код, для открытия шкатулки readOpenCode(); // проверяем правильный ли код if(checkOpenCode() == true) { // если код правильный Serial.println("Password accepted"); for(int i = 1; i < 15; i++) { tone(BUZZER_PIN, 2000, 1000/i); if(readAzimut() == true) { Serial.println("Box is opened"); open(); return; } delay(2000/i); } Serial.println("Box is not opened"); } else { Serial.println("Password not accepted"); tone(BUZZER_PIN, 500, 2000); } break; } // установка нового кода case SETPWD: { // устанавливаем новый код setCode(); // уходим на подтверждение state = CNFPWD; break; } // подтверждаем кодовую последовательность case CNFPWD: { // повторяем ввод нового кода setConfirmCode(); if(checkConfirmCode() == true) { Serial.println("Code confirm accepted"); tone(BUZZER_PIN, 2000, 300); close(); }else { Serial.println("Code confirm not accepted"); tone(BUZZER_PIN, 500, 2000); // повторяем ввод кода state = SETPWD; } break; } } } // считывание углов Эйлера void readYawPitchRoll() { // считываем данные с акселерометра в единицах G accel.readGXYZ(&ax, &ay, &az); // считываем данные с гироскопа в радианах в секунду gyro.readRadPerSecXYZ(&gx, &gy, &gz); // считываем данные с компаса в Гауссах compass.readCalibrateGaussXYZ(&mx, &my, &mz); // устанавливаем коэффициенты фильтра filter.setKoeff(fps, BETA); // обновляем входные данные в фильтр filter.update(gx, gy, gz, ax, ay, az, mx, my, mz); // получение углов yaw, pitch и roll из фильтра yaw = filter.getYawDeg(); pitch = filter.getPitchDeg(); roll = filter.getRollDeg(); } // двигается ли шкатулка bool stayIMU() { // запоминаем предыдущие значения углов для сглаживания мелкого дрифта float prevYaw = yaw; float prevPitch = pitch; float prevRoll = roll; // считываем углы Эйлера readYawPitchRoll(); // проверяем дрифт углов if ((prevYaw - yaw < DRIFT_LIMIT && prevYaw - yaw > -DRIFT_LIMIT) && (prevPitch - pitch < DRIFT_LIMIT && prevPitch - pitch > -DRIFT_LIMIT) && (prevRoll - roll < DRIFT_LIMIT && prevRoll - roll > -DRIFT_LIMIT)) { // шкатулка остановилась return true; } else // катулка движется в пространстве return false; } // двигается ли шкатулка с проверкой на время bool stayIMU(int interval) { // текущее состояние шкатулки if (stayIMU() == false) { flag = 0; return false; } if (flag == 0) { // запоминаем текущее время prevMillis = millis(); flag = 1; return false; } // ожидаем выдержку по времени if(flag == 1 && millis() - prevMillis > interval) { flag = 0; prevMillis = millis(); return true; } else { return false; } prevMillis = millis(); return false; } // установка кода void setCode() { Serial.println("Set code:"); for(int i = 0; i < N; i++) { while(!stayIMU(3000)) { } codeBox[i].x = yaw; codeBox[i].y = pitch; codeBox[i].z = roll; tone(BUZZER_PIN, 1000, 100); Serial.print("Saving set "); Serial.println(i+1); } delay(200); tone(BUZZER_PIN, 1000, 100); delay(200); tone(BUZZER_PIN, 1000, 100); } // подтверждение кода void setConfirmCode() { Serial.println("Confirm code:"); for(int i = 0; i < N; i++) { while(!stayIMU(3000)) { } confirmCodeBox[i].x = yaw; confirmCodeBox[i].y = pitch; confirmCodeBox[i].z = roll; tone(BUZZER_PIN, 1000, 100); Serial.print("Saving confirm "); Serial.println(i+1); } delay(200); tone(BUZZER_PIN, 1000, 100); delay(200); tone(BUZZER_PIN, 1000, 100); } // проверка кода bool checkConfirmCode() { bool checkCode = true; for(int i = 0; i < N && checkCode == true; i++) { if ((abs(codeBox[i].x) - abs(confirmCodeBox[i].x) < DRIFT_COMPRASION && abs(codeBox[i].x) - abs(confirmCodeBox[i].x) > -DRIFT_COMPRASION) && (abs(codeBox[i].y) - abs(confirmCodeBox[i].y) < DRIFT_COMPRASION && abs(codeBox[i].y) - abs(confirmCodeBox[i].y) > -DRIFT_COMPRASION) && (abs(codeBox[i].z) - abs(confirmCodeBox[i].z) < DRIFT_COMPRASION && abs(codeBox[i].z) - abs(confirmCodeBox[i].z) > -DRIFT_COMPRASION)) { checkCode = true; } else { checkCode = false; } } return checkCode; } // считывание пароля для открытия шкатулки void readOpenCode() { for(int i = 0; i < N; i++) { while(!stayIMU(3000)) { } codeOpenBox[i].x = yaw; codeOpenBox[i].y = pitch; codeOpenBox[i].z = roll; tone(BUZZER_PIN, 1000, 100); delay(200); Serial.print("Save "); Serial.println(i+1); } } // проверка введённого пароля с паролем шкатулки bool checkOpenCode() { bool checkPass = true; for(int i = 0; i < N && checkPass == true; i++) { if ((abs(codeOpenBox[i].x) - abs(codeBox[i].x) < DRIFT_COMPRASION && abs(codeOpenBox[i].x) - abs(codeBox[i].x) > -DRIFT_COMPRASION) && (abs(codeOpenBox[i].y) - abs(codeBox[i].y) < DRIFT_COMPRASION && abs(codeOpenBox[i].y) - abs(codeBox[i].y) > -DRIFT_COMPRASION) && (abs(codeOpenBox[i].z) - abs(codeBox[i].z) < DRIFT_COMPRASION && abs(codeOpenBox[i].z) - abs(codeBox[i].z) > -DRIFT_COMPRASION)) { checkPass = true; } else { checkPass = false; } } return checkPass; } // проверка напраление шкатулки относительно севера bool readAzimut() { bool checkAzimut = true; float x = compass.readAzimut(); Serial.println(x); if (x < DRIFT_COMPRASION && x > -DRIFT_COMPRASION){ checkAzimut = true; } else { checkAzimut = false; } return checkAzimut; } // вывод углов Эйлера в serial-порт void printYawPitchRoll() { Serial.print("yaw: "); Serial.print(yaw); Serial.print("\t\t"); Serial.print("pitch: "); Serial.print(pitch); Serial.print("\t\t"); Serial.print("roll: "); Serial.println(roll); } // Функция отпирает замок void open(void) { digitalWrite(INDICATOR_PIN_1, HIGH); digitalWrite(INDICATOR_PIN_2, HIGH); myServo.write(0); state = OPENED; } // функция запирает замок void close(void) { digitalWrite(INDICATOR_PIN_1, LOW); digitalWrite(INDICATOR_PIN_2, LOW); myServo.write(70); state = CLOSED; }
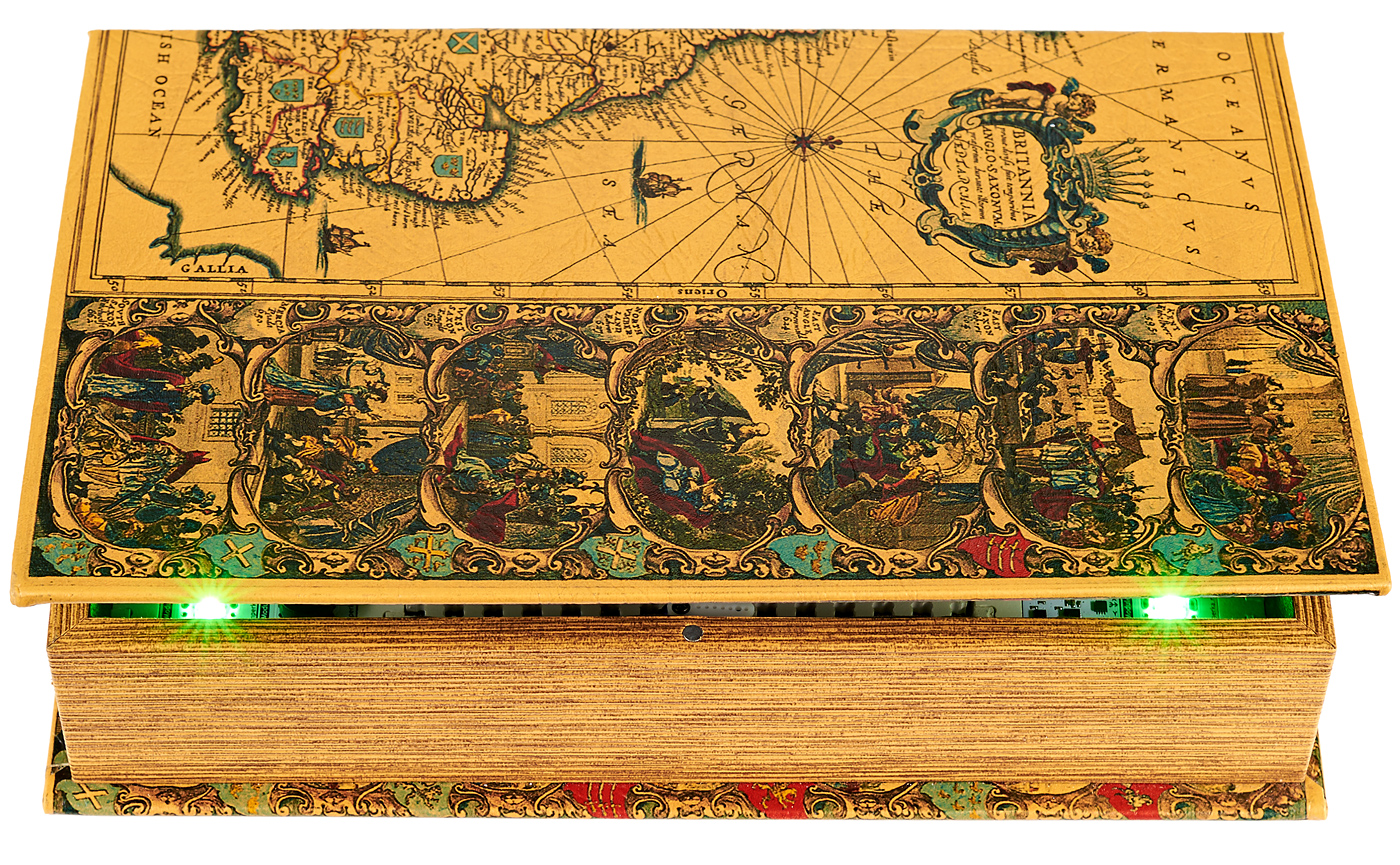
Демонстрация работы устройства
Что дальше?
Сделайте настоящую Himitsu-Bako без электронных компонентов снаружи. Замените корпусную кнопку на датчик шума (Troyka-модуль), и вместо нажатия на кнопку — стучите по шкатулке.