Содержание
GPS/GLONASS v1 (Troyka-модуль): инструкция, примеры использования и документация
 Модуль GPS/GLONASS v1 принимает сигналы спутников глобального позиционирования — GPS, GLONASS и Galileo — и рассчитывает свои географические координаты, скорость перемещения, высоту над уровнем моря и точное локальное время.
Модуль GPS/GLONASS v1 принимает сигналы спутников глобального позиционирования — GPS, GLONASS и Galileo — и рассчитывает свои географические координаты, скорость перемещения, высоту над уровнем моря и точное локальное время.
Данные передаются на управляющую электронику в текстовом формате NMEA по интерфейсу UART.
Видеообзор
Принцип работы систем спутниковой навигации
Спутники непрерывно передают навигационные сигналы на дециметровых волнах. В сигнал входят метки точного времени и координаты самого спутника.
Навигатор, по задержке прохождения сигнала со спутника рассчитывает точное расстояние до него. Затем повторяет эту операцию для остальных известных спутников. Эти данные сводятся вместе — так получается точное значение координат приёмника.
Для работы навигаторов нужно открытое небо с минимум четырьмя спутниками в прямой видимости. Чтобы
система работала по всей планете в каждой орбитальной группировке приходится держать более двух десятков
спутников.
GPS-модуль общается с управляющей платой с помощью NMEA-сообщений (от «National Marine Electronics Association») — это стандарт передачи данных оборудования навигации, связи и других информационных сетей.
Подключение и настройка
GPS/GLONASS-модуль общается с управляющей платой по протоколу UART. В зависимости от управляющей платформы выберите вариант подключения GPS-модуля.
HardwareSerial
На управляющей плате Iskra JS и Arduino платах с микроконтроллером ATmega32U4 / ATSAMD21G18, данные по USB и общение через пины 0 и 1 осуществляется через два раздельных UART. Это даёт возможность подключить GPS-модуль к аппаратному UART на пинах 0 и 1.
Список поддерживаемых плат:
При подключении удобно использовать Troyka Shield.
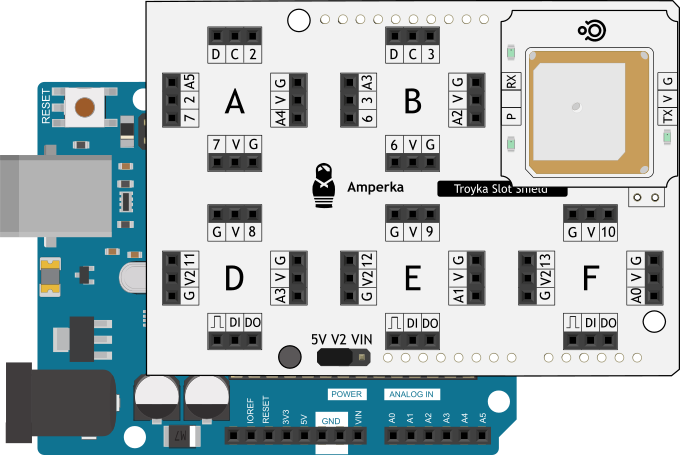
 С Troyka Slot Shield можно обойтись без лишних проводов.
С Troyka Slot Shield можно обойтись без лишних проводов.
SoftwareSerial
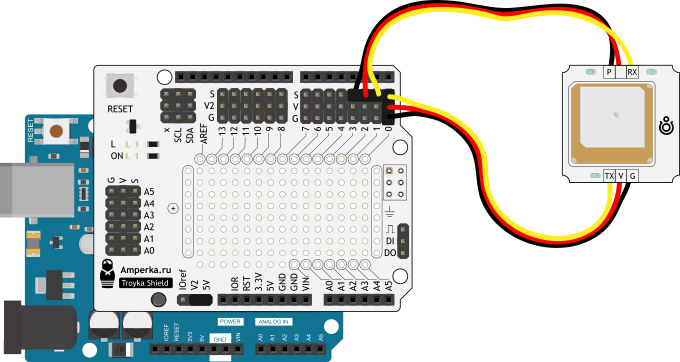
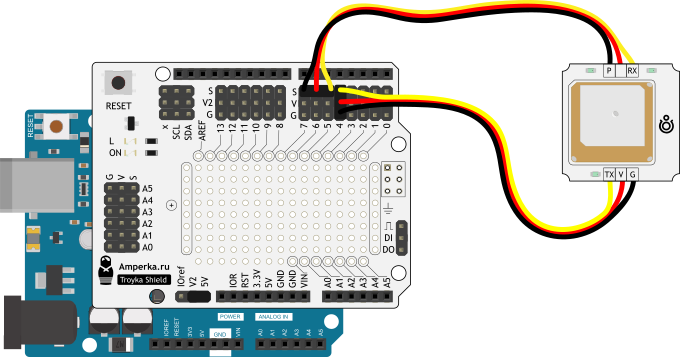
Некоторые платы Arduino, например, Uno, прошиваются через пины 0 и 1. Это означает невозможность использовать одновременно прошивку/отладку по USB и общение с GPS-модулем. Решение проблемы — программный UART. Подключите пины TX и RX GPS-модуля к другим контактам управляющей платы и используйте библиотеку SoftwareSerial.
Для примера подключим управляющие пины GPS-модуля TX и RX — на 4 и 5 контакты управляющей платы.
При подключении удобно использовать Troyka Shield.
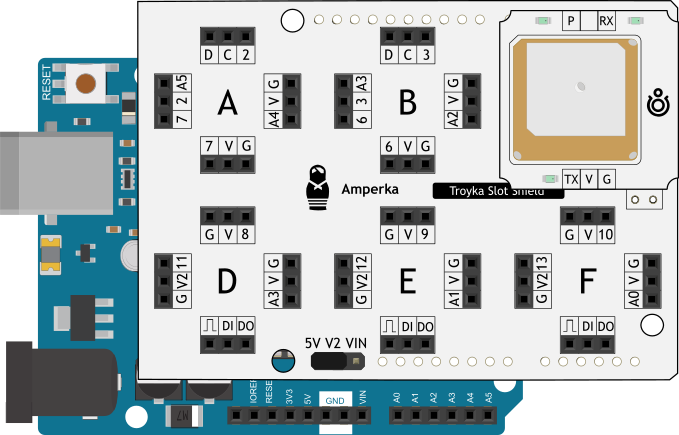
 С Troyka Slot Shield можно обойтись без лишних проводов.
С Troyka Slot Shield можно обойтись без лишних проводов.
HardwareSerial Mega
На платах форм-фактора Arduino Mega 2560 аппаратный UART, который отвечает за передачу данных через пины 1 и 0, отвечает также за передачу по USB. Это означает невозможность использовать одновременно UART для коммуникации с GPS-модулем и отладки по USB.
Но на платах такого форм-фактора есть ещё дополнительно 3 аппаратных UART:
- Serial1: пины
19(RX1)и18(TX1); - Serial2: пины
17(RX2)и16(TX2); - Serial3: пины
15(RX3)и14(TX3).
Список поддерживаемых плат:
Подключим GPS-модуль к объекту Serial1 на пины 18 и 19 на примере платы Arduino Mega 2560.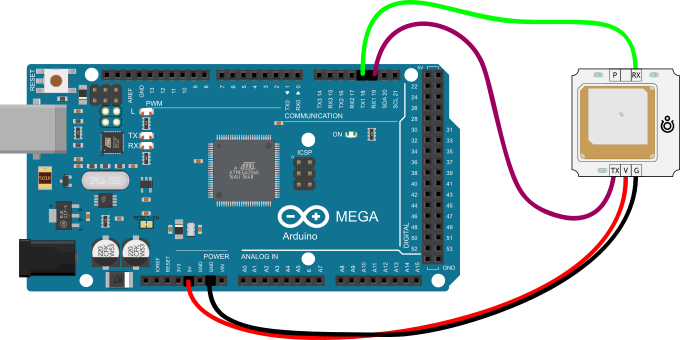
Примеры работы
Рассмотрим примеры работы GPS-модуля в зависимости от управляющей платформы.
Пример для Arduino HardwareSerial
В качестве примера выведем в Serial данные с GPS-модуля. Распарсим строки в отдельные переменные и сохраним их. Для этого скачайте и установите библиотеку TroykaGPS.
- gpsTestHardwareSerial.ino
// библиотека для работы с GPS устройством #include <TroykaGPS.h> // serial-порт к которому подключён GPS-модуль #define GPS_SERIAL Serial1 // создаём объект класса GPS и передаём в него объект Serial1 GPS gps(GPS_SERIAL); // задаём размер массива для времени, даты, широты и долготы #define MAX_SIZE_MASS 16 // массив для хранения текущего времени char strTime[MAX_SIZE_MASS]; // массив для хранения текущей даты char strDate[MAX_SIZE_MASS]; // массив для хранения широты в градусах, минутах и секундах char latitudeBase60[MAX_SIZE_MASS]; // массив для хранения долготы в градусах, минутах и секундах char longitudeBase60[MAX_SIZE_MASS]; void setup() { // открываем последовательный порт для мониторинга действий в программе // и передаём скорость 9600 бод Serial.begin(9600); // ждём, пока не откроется монитор последовательного порта // для того, чтобы отследить все события в программе while (!Serial) { } Serial.print("Serial init OK\r\n"); // открываем Serial-соединение с GPS-модулем на скорости 115200 бод GPS_SERIAL.begin(115200); // печатаем строку Serial.println("GPS init is OK on speed 115200"); // изменяем скорость обещение GPS-модуля с управляющей платой на 9600 бод // используем NMEA-команду «$PMTK251,9600*17\r\n» GPS_SERIAL.write("$PMTK251,9600*17\r\n"); // закрываем Serial-соединение с GPS-модулем GPS_SERIAL.end(); // открываем Serial-соединение с GPS-модулем на скорости 9600 бод GPS_SERIAL.begin(9600); // печатаем строку Serial.print("GPS init is OK on speed 9600"); } void loop() { // если пришли данные с GPS-модуля if (gps.available()) { // считываем данные и парсим gps.readParsing(); // проверяем состояние GPS-модуля switch (gps.getState()) { // всё OK case GPS_OK: Serial.println("GPS is OK"); // выводим координаты широты и долготы // 1. в градусах, минутах и секундах // 2. градусах в виде десятичной дроби Serial.println("GPS Coordinates: "); gps.getLatitudeBase60(latitudeBase60, MAX_SIZE_MASS); gps.getLongitudeBase60(longitudeBase60, MAX_SIZE_MASS); Serial.print("Latitude\t"); Serial.print(latitudeBase60); Serial.print("\t\t"); Serial.println(gps.getLatitudeBase10(), 6); Serial.print("Longitude\t"); Serial.print(longitudeBase60); Serial.print("\t\t"); Serial.println(gps.getLongitudeBase10(), 6); // выводим количество видимых спутников Serial.print("Sat: "); Serial.println(gps.getSat()); // выводим текущую скорость Serial.print("Speed: "); Serial.println(gps.getSpeedKm()); // выводим высоту над уровнем моря Serial.print("Altitude: "); Serial.println(gps.getAltitude()); // выводим текущее время Serial.print("Time: "); gps.getTime(strTime, MAX_SIZE_MASS); gps.getDate(strDate, MAX_SIZE_MASS); Serial.write(strTime); Serial.println(); // выводим текущую дату Serial.print("Date: "); Serial.write(strDate); Serial.println("\r\n"); // каждую переменную дату и времени можно выводить отдельно /* Serial.print(gps.getHour()); Serial.print(gps.getMinute()); Serial.print(gps.getSecond()); Serial.print(gps.getDay()); Serial.print(gps.getMonth()); Serial.print(gps.getYear()); */ break; // ошибка данных case GPS_ERROR_DATA: Serial.println("GPS error data"); break; // нет соединения со спутниками case GPS_ERROR_SAT: Serial.println("GPS is not connected to satellites!!!"); break; } } }
Пример для Arduino SoftwareSerial
В отличии от аппаратного UART (HardwareSerial), за работу программного UART (SoftwareSerial) отвечает микроконтроллер, который назначает другие пины в режим работы RX и TX, соответственно и данные которые приходят от модуля GPS обрабатывает сам микроконтроллер во время программы. По умолчанию скорость общения GPS-модуля равна 115200, что значительно выше чем позволяет библиотека SoftwareSerial. В итоге часть информации которая приходит с GPS-модуля будет утеряна.
Решение понизить скорость общения GPS-модуля с управляющей платой.
Из описание команд управления GPS-модулем найдём NMEA-команду понижение скорости до 9600бод.
$PMTK251,9600*17
Данную команду придётся выполнять при каждом новом включении GPS-модуля. В качестве примера выведем в Serial данные с GPS-модуля. Распарсим строки в отдельные переменные и сохраним их. Для этого скачайте и установите библиотеку TroykaGPS
- SoftwareSerialGpsTest.ino
// библиотека для работы с GPS устройством #include <TroykaGPS.h> // библиотека для работы программного Serial #include <SoftwareSerial.h> // создаём объект для работы с программным Serial // и передаём ему пины TX и RX SoftwareSerial mySerial(4, 5); // serial-порт к которому подключён GPS-модуль #define GPS_SERIAL mySerial // создаём объект класса GPS и передаём в него объект GPS_SERIAL GPS gps(GPS_SERIAL); // задаём размер массива для времени, даты, широты и долготы #define MAX_SIZE_MASS 16 // массив для хранения текущего времени char strTime[MAX_SIZE_MASS]; // массив для хранения текущей даты char strDate[MAX_SIZE_MASS]; // массив для хранения широты в градусах, минутах и секундах char latitudeBase60[MAX_SIZE_MASS]; // массив для хранения долготы в градусах, минутах и секундах char longitudeBase60[MAX_SIZE_MASS]; void setup() { // открываем последовательный порт для мониторинга действий в программе // и передаём скорость 9600 бод Serial.begin(9600); // ждём, пока не откроется монитор последовательного порта // для того, чтобы отследить все события в программе while (!Serial) { } Serial.print("Serial init OK\r\n"); // открываем Serial-соединение с GPS-модулем на скорости 115200 бод GPS_SERIAL.begin(115200); // печатаем строку Serial.println("GPS init is OK on speed 115200"); // изменяем скорость обещение GPS-модуля с управляющей платой на 9600 бод // используем NMEA-команду «$PMTK251,9600*17\r\n» GPS_SERIAL.write("$PMTK251,9600*17\r\n"); // закрываем Serial-соединение с GPS-модулем GPS_SERIAL.end(); // открываем Serial-соединение с GPS-модулем на скорости 9600 бод GPS_SERIAL.begin(9600); // печатаем строку Serial.print("GPS init is OK on speed 9600"); } void loop() { // если пришли данные с gps-модуля if (gps.available()) { // считываем данные и парсим gps.readParsing(); // проверяем состояние GPS-модуля switch(gps.getState()) { // всё OK case GPS_OK: Serial.println("GPS is OK"); // выводим координаты широты и долготы // 1. в градусах, минутах и секундах // 2. градусах в виде десятичной дроби Serial.println("GPS Coordinates: "); gps.getLatitudeBase60(latitudeBase60, MAX_SIZE_MASS); gps.getLongitudeBase60(longitudeBase60, MAX_SIZE_MASS); Serial.print("Latitude\t"); Serial.print(latitudeBase60); Serial.print("\t\t"); Serial.println(gps.getLatitudeBase10(), 6); Serial.print("Longitude\t"); Serial.print(longitudeBase60); Serial.print("\t\t"); Serial.println(gps.getLongitudeBase10(), 6); // выводим количество видимых спутников Serial.print("Sat: "); Serial.println(gps.getSat()); // выводим текущую скорость Serial.print("Speed: "); Serial.println(gps.getSpeedKm()); // выводим высоту над уровнем моря Serial.print("Altitude: "); Serial.println(gps.getAltitude()); // выводим текущее время Serial.print("Time: "); gps.getTime(strTime, MAX_SIZE_MASS); gps.getDate(strDate, MAX_SIZE_MASS); Serial.write(strTime); Serial.println(); // выводим текущую дату Serial.print("Date: "); Serial.write(strDate); Serial.println("\r\n"); // каждую переменную дату и времени можно выводить отдельно /* Serial.print(gps.getHour()); Serial.print(gps.getMinute()); Serial.print(gps.getSecond()); Serial.print(gps.getDay()); Serial.print(gps.getMonth()); Serial.print(gps.getYear()); */ break; // ошибка данных case GPS_ERROR_DATA: Serial.println("GPS error data"); break; // нет соединение со спутниками case GPS_ERROR_SAT: Serial.println("GPS no connect to satellites!!!"); break; } } }
Пример кода для Iskra JS
Выведем данные о координатах, высоте над уровнем моря, количестве видимых спутников и точном времени в консоль Web IDE.
- testGPS.js
Serial3.setup(115200, {rx: P0, tx: P1}); var gps = require("GPS").connect(Serial3, function(data) { console.log(data); });
Каждую секунду в консоль будет выводится информация от модуля.
{ "time":"16:35:29", "lat":53.068403,"lon":-4.076282,"fix":1,"satellites":7,"altitude":1085.0 }
Элементы платы

Модуль NL3333
NL3333 – навигационный приемник НАВИА, выполненный в оригинальном форм-факторе 8.7×9.5 мм на базе чипсета MediaTek MT3333.
Приемник использует весь спектр GNSS систем: GPS, GLONASS и Galileo. NL3333 отличается высокой чувствительностью, малым энергопотреблением и быстрым временем первой фиксации (TTFF). Связь с модулем осуществляется через UART, данные выводятся по протоколу NMEA.
Контакты подключения трёхпроводных шлейфов
На модуле выведены две группы Troyka-контактов.
Нижняя группа
- Сигнальный (TX) — цифровой выход GPS-модуля. Подключите к пину RX микроконтроллера.
- Питание (V) — соедините с рабочим напряжением микроконтроллера.
- Земля (G) — соедините с землёй микроконтроллера.
Верхняя группа
- Сигнальный (RX) — цифровой вход GPS-модуля. Подключите к пину TX микроконтроллера.
- Сигнальный (P) — пин синхронизации GPS-модуля. Подключите к цифровому пину микроконтроллера.
Антенна
Пассивная антенна GPS/GLONAS на керамической подложке необходима для приёма сигнала навигационным приемником GPS/GLONASS.
Преобразователь логических уровней
Необходим для сопряжения устройств с разными напряжениями логических уровней.
В нашем случае это может быть управляющее устройство Arduino с 5 вольтовой логикой и GPS/GLONASS модуль с 3,3 вольтовой логикой.
Светодиодная индикация
| Имя светодиода | Назначение |
|---|---|
| RX и TX | Мигают при обмене данными между GPS/GLONASS модулем и управляющим устройством. |
| P | Индикатор приёма спутниковых сигналов. Мигает если GPS-модуль «нашёл себя» |
Обновление прошивки
Периодически выходят новые версии прошивки для GPS-приёмников с улучшениями и новыми функциями.
Принципиальная и монтажная схемы



Характеристики
- Чипсет: NL3333
- Навигационные системы: GPS, GLONASS, BeiDou
- Рабочие частоты:
- GPS L1: 1575.42 МГц
- GLONASS L1: 1598.0625–1605.375 МГц
- GALILEO E1: 1575.42 МГц
- Протоколы передачи данных: NMEA
- Скорость передачи данных по умолчанию: 115200 бод
- Размеры встроенной антенны: 40×40 мм
- Поляризация: RHCP (правая круговая поляризация)
- Погрешность позиционирования: менее 3 м
- Горячий старт: 1 с
- Холодный старт: 28 с
- Рабочее напряжение: 3,3–5 В
- Потребляемый ток: до 25 мА
- Габариты: 25,4×25,4 мм
{kind=link}